Framework PEAS
El primer paso para diseñar un agente es especificar su task environment de manera precisa. El framework PEAS proporciona una estructura sistemática para esta especificación.
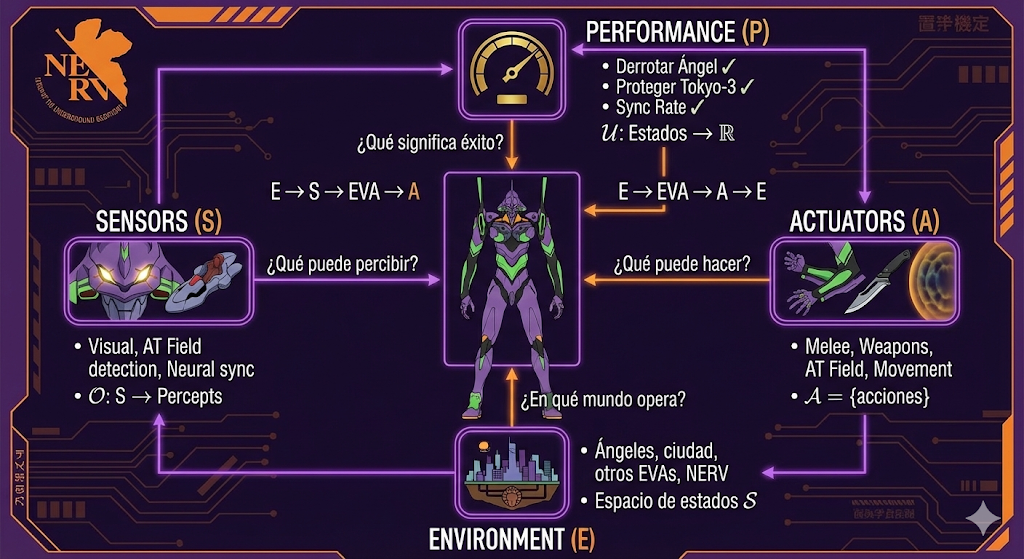
Los 4 Componentes
PEAS = Performance, Environment, Actuators, Sensors
graph TD
subgraph "Task Environment (El Problema)"
P[Performance Measure]
E[Environment]
end
subgraph "Agent Design (La Solución)"
A[Actuators]
S[Sensors]
end
E -->|Define qué observar| S
E -->|Define qué controlar| A
P -->|Define qué optimizar| D[Diseño del Agente]
S -->|Información| D
D -->|Control| A
Cada componente responde a una pregunta fundamental. Antes de ver la tabla resumen, definamos la notación usando Pac-Man como ejemplo unificador:
Notación Matemática
| Símbolo | Nombre | Descripción | Ejemplo: Pac-Man |
|---|---|---|---|
| $\mathcal{S}$ | Espacio de estados | El conjunto de todas las configuraciones posibles del mundo. Es la “realidad completa” en cualquier momento. | Todas las combinaciones de: posición de Pac-Man, posición de cada fantasma, qué pellets quedan, power-ups activos, vidas restantes, puntuación actual |
| $\mathcal{A}$ | Espacio de acciones | El conjunto de todas las acciones que el agente puede ejecutar. Define su “vocabulario de control”. | ${↑, ↓, ←, →, quedarse}$ — los 5 movimientos posibles |
| $\mathcal{P}$ | Espacio de percepts | El conjunto de todos los percepts posibles. Un percept es una observación individual — lo que los sensores entregan al agente en un instante. Es su “ventana al mundo”: no el mundo real, sino la representación que el agente recibe. La percept sequence es la historia completa de percepts. | Si Pac-Man solo ve 3 casillas adelante: cada percept es una “foto” de esas 3 casillas. $\mathcal{P}$ = todas las combinaciones posibles de {vacío, muro, pellet, fantasma, power-up} en esas posiciones |
| $U$ | Función de utilidad | Una función que asigna un valor numérico a estados o secuencias de estados. Define qué significa “éxito”. | $U =$ puntuación final. Comer pellet = +10, comer fantasma = +200, perder vida = -500 |
| $T$ | Función de transición | Describe cómo el mundo cambia cuando el agente actúa. Dado el estado actual y una acción, produce el siguiente estado. | Si Pac-Man está en (3,4) y ejecuta →, entonces se mueve a (4,4). Si hay fantasma ahí, pierde vida. |
| $O$ | Función de observación | Transforma el estado real en una percepción. Es el “filtro” entre la realidad y lo que el agente ve. Puede perder información (observabilidad parcial) o agregar ruido (sensores imperfectos). | El estado real tiene toda la info del laberinto, pero $O$ solo devuelve las 3 casillas que Pac-Man puede “ver” desde su posición |
| $\mathbb{R}$ | Números reales | El espacio de valores numéricos. Permite expresar “mejor” y “peor” cuantitativamente. | Puntuación: 0, 100, 2500, etc. |
Percept vs Función de Observación: El percept es lo que el agente recibe — una “foto” del mundo en un instante. La función de observación $O$ es el proceso que genera esa foto — cómo los sensores transforman la realidad en un percept. Piensa en $O$ como una cámara y cada percept como una foto que esa cámara toma. $\mathcal{P}$ es el álbum de todas las fotos posibles.
Edge Cases: Cuando el Percept ≠ Realidad
| Caso | Ejemplo | Estado Real $s$ | Percept $O(s)$ | Problema |
|---|---|---|---|---|
| Parcial | Poker | Todas las cartas del mazo | Solo tus 2 cartas | Información oculta — no sabes qué tiene el rival |
| Ruidoso | GPS | Posición exacta (3.4521, -5.1234) | (3.45 ± 0.01, -5.12 ± 0.01) | Error de medición — puedes estar en el carril equivocado |
| Aliasing | Robot en pasillo | Pasillo A vs Pasillo B (idénticos) | “Paredes a ambos lados” | Mismo percept, estados distintos — ¿dónde estoy? |
| Retrasado | Trading | Precio actual: $105 | Último dato: $100 (hace 2s) | Latencia — decides con info obsoleta |
| Alucinación | Cámara + adversarial patch | Señal de STOP | “Límite 45 mph” | El sensor “ve” algo que no existe |
| Nulo | Cámara en oscuridad | Obstáculo adelante | Imagen negra | Sin información útil — ¿qué haces? |
Implicación para diseño: El agente debe razonar sobre la incertidumbre de su percept, no asumir que $O(s) = s$.
Resumen: Los 4 Componentes Formalizados
Con esta notación, cada componente PEAS tiene una interpretación precisa:
| Componente | Pregunta | Formalización | Lectura | Pac-Man |
|---|---|---|---|---|
| Performance | ¿Qué significa éxito? | $U: \mathcal{S} \to \mathbb{R}$ | “U toma un estado y devuelve qué tan bueno es” | Puntuación final del juego |
| Environment | ¿En qué mundo opera? | $\mathcal{S}$; $T: \mathcal{S} \times \mathcal{A} \to \mathcal{S}$ | “S son los estados posibles, T dice cómo cambian con cada acción” | El laberinto con sus reglas de movimiento |
| Actuators | ¿Qué puede hacer? | $\mathcal{A}$ | “El menú de acciones disponibles” | Controles: ↑↓←→ |
| Sensors | ¿Qué puede percibir? | $O: \mathcal{S} \to \mathcal{P}$ | “O transforma el estado real en un percept” | Visión limitada → percept de 3 casillas |
Performance Measure: Definiendo el Éxito
Formalización Matemática
El performance measure es una función que asigna un valor numérico a secuencias de estados del environment:
$$U: \mathcal{S}^T \to \mathbb{R}$$
Donde $\mathcal{S}^T$ representa secuencias de estados a lo largo del tiempo.
Tipos de Performance Measures
| Tipo | Fórmula | Ejemplo |
|---|---|---|
| Final state | $U = f(s_T)$ | Ajedrez: ganar/perder al final |
| Cumulative | $U = \sum_{t} r_t$ | Total de puntos en un juego |
| Discounted | $U = \sum_{t} \gamma^t r_t$ | Valor presente de recompensas futuras |
| Average | $U = \frac{1}{T}\sum_{t} r_t$ | Throughput promedio |
| Worst-case | $U = \min_t r_t$ | Seguridad: evitar cualquier falla |
El Factor de Descuento $\gamma$
El factor de descuento $\gamma \in [0,1]$ controla cuánto importa el futuro:
$$U = r_0 + \gamma r_1 + \gamma^2 r_2 + \gamma^3 r_3 + \cdots = \sum_{t=0}^{\infty} \gamma^t r_t$$
| $\gamma$ | Comportamiento | Horizonte efectivo |
|---|---|---|
| $\gamma = 0$ | Solo importa el presente | 1 paso |
| $\gamma = 0.9$ | Balance presente/futuro | ~10 pasos |
| $\gamma = 0.99$ | El futuro importa mucho | ~100 pasos |
| $\gamma \to 1$ | Todos los pasos importan igual | Infinito |
Interpretación financiera: Si $\gamma = 0.95$, entonces $1 mañana vale $0.95 hoy. Esto captura:
- Incertidumbre sobre el futuro
- Preferencia temporal (impaciente vs paciente)
- Posibilidad de que el proceso termine
Performance Measures Multiobjetivo
En la realidad, los agentes tienen múltiples objetivos que pueden conflictuar:
$$U = w_1 U_1 + w_2 U_2 + \cdots + w_n U_n$$
Donde $\sum_i w_i = 1$ y cada $w_i \geq 0$ representa la importancia relativa.
| Objetivo | Métrica | Conflicto con |
|---|---|---|
| Seguridad | $U_s$ = −(número de accidentes) | Velocidad (más lento = más seguro) |
| Rapidez | $U_r$ = −(tiempo de viaje) | Seguridad, comodidad |
| Comodidad | $U_c$ = −(aceleración máxima) | Rapidez |
| Costo | $U_k$ = −(combustible gastado) | Rapidez, confort (AC) |
| Legalidad | $U_l$ = −(número de infracciones) | Rapidez |
El problema: ¿Cómo elegir los pesos $w_s, w_r, w_c, w_k, w_l$?
Diferentes stakeholders tienen diferentes preferencias:
- Pasajero apurado: Alto $w_r$
- Pasajero nervioso: Alto $w_s$, $w_c$
- Empresa de taxis: Alto $w_k$
- Regulador: Alto $w_l$, $w_s$
Pareto Optimality
Cuando hay múltiples objetivos, una solución es Pareto óptima si no se puede mejorar un objetivo sin empeorar otro.
graph LR
subgraph "Frontera de Pareto"
A[Muy seguro, muy lento]
B[Seguro, rápido]
C[Algo seguro, muy rápido]
end
D[Subóptimo: lento Y peligroso]
D -.-> B
En el diseño de agentes, a menudo buscamos soluciones en la frontera de Pareto y dejamos que el usuario elija según sus preferencias.
Environment: El Mundo del Agente
Formalización Matemática
El environment se define por:
- Espacio de estados $\mathcal{S}$: Todos los estados posibles del mundo
- Estado inicial $s_0 \in \mathcal{S}$: Donde empieza el agente
- Función de transición $T: \mathcal{S} \times \mathcal{A} \to \mathcal{S}$ (determinista) o $T: \mathcal{S} \times \mathcal{A} \to \Delta(\mathcal{S})$ (estocástica)
¿Qué es $\Delta(\mathcal{S})$? Es el simplex de probabilidad sobre $\mathcal{S}$ — el conjunto de todas las distribuciones de probabilidad válidas sobre los estados:
$\Delta(S) := \{p \mid p : S \to [0,1],\ \sum_{s \in S} p(s) = 1\}$
Es decir, $\Delta(\mathcal{S})$ contiene vectores de probabilidades que suman 1. Cuando $T$ mapea a $\Delta(\mathcal{S})$, significa que dado (estado, acción), obtienes una distribución sobre posibles siguientes estados, no un estado único.
Transiciones Deterministas vs Estocásticas
Determinista: El siguiente estado está completamente determinado: $$s_{t+1} = T(s_t, a_t)$$
Estocástica: El siguiente estado es una distribución de probabilidad: $$P(s_{t+1} | s_t, a_t) = T(s_t, a_t, s_{t+1})$$
Estados: $\mathcal{S} = {A, B} \times {0, 1} \times {0, 1}$
- Posición del robot: ${A, B}$
- Estado del cuarto A: ${0=limpio, 1=sucio}$
- Estado del cuarto B: ${0=limpio, 1=sucio}$
Tamaño: $|\mathcal{S}| = 2 \times 2 \times 2 = 8$ estados
Acciones: $\mathcal{A} = {Left, Right, Suck}$
Transiciones (ejemplo):
- $T((A, 1, 0), Suck) = (A, 0, 0)$ — aspirar limpia el cuarto A
- $T((A, 0, 1), Right) = (B, 0, 1)$ — moverse a B
Performance (por timestep):
$$r_t = \mathbb{1}[A\ limpio] + \mathbb{1}[B\ limpio]$$
Complejidad del Espacio de Estados
| Problema | Variables de Estado | $|\mathcal{S}|$ |
|---|---|---|
| Vacuum World | 3 binarias | $2^3 = 8$ |
| Ajedrez | ~40 piezas × 64 casillas | $\sim 10^{43}$ |
| Go | 361 posiciones × 3 estados | $\sim 10^{170}$ |
| Taxi autónomo | Continuas | $\infty$ |
Actuators: La Capacidad de Actuar
Formalización Matemática
Los actuators definen el espacio de acciones disponibles para el agente:
$$\mathcal{A} = {a_1, a_2, \ldots, a_n}$$
Tipos de Espacios de Acciones
| Tipo | Descripción | Ejemplo | Formalización |
|---|---|---|---|
| Discreto finito | Número finito de acciones | Ajedrez | $\mathcal{A} = {a_1, \ldots, a_n}$ |
| Discreto infinito | Infinitas acciones enumerables | Elegir un número entero | $\mathcal{A} = \mathbb{Z}$ |
| Continuo | Acciones en espacio continuo | Ángulo de volante | $\mathcal{A} \subseteq \mathbb{R}^n$ |
| Híbrido | Mezcla de discreto y continuo | Cambiar marcha + acelerar | $\mathcal{A} = {1,…,5} \times [0,1]$ |
Restricciones en Acciones
No todas las acciones están disponibles en todos los estados. Definimos:
$$\mathcal{A}(s) \subseteq \mathcal{A}$$
Como el conjunto de acciones válidas en el estado $s$.
En ajedrez, $\mathcal{A}(s)$ depende de:
- Qué piezas tiene el jugador
- Dónde están ubicadas
- Si hay jaque
- Reglas especiales (enroque, en passant)
En promedio: $|\mathcal{A}(s)| \approx 35$ movimientos legales por posición.
En la posición inicial: $|\mathcal{A}(s_0)| = 20$ (16 movimientos de peones + 4 de caballos).
Efectos de las Acciones
Las acciones pueden tener efectos:
| Propiedad | Determinista | Estocástico |
|---|---|---|
| Efecto | Un único resultado | Distribución de resultados |
| Fórmula | $s’ = T(s, a)$ | $s’ \sim P(\cdot \mid s,a)$ |
| Ejemplo | Mover pieza en ajedrez | Tirar un dado |
Acciones Continuas: El Espacio de Control
Para sistemas físicos, el espacio de acciones es típicamente continuo:
Carro autónomo:
$$\mathcal{A} = [-\theta_{max}, \theta_{max}] \times [0, 1] \times [0, 1]$$
Donde: primer intervalo = ángulo de volante, segundo = acelerador, tercero = freno.
Robot con n articulaciones:
$$\mathcal{A} = \prod_{i=1}^{n} [\tau_i^{min}, \tau_i^{max}]$$
Donde $\tau_i$ es el torque aplicado a la articulación $i$.
Sensors: Percibiendo el Mundo
Formalización Matemática
Los sensors definen una función de observación:
$$O: \mathcal{S} \to \mathcal{P}$$
Donde $\mathcal{P}$ es el espacio de percepts.
Observabilidad
| Tipo | Condición | Implicación |
|---|---|---|
| Fully Observable | $O$ es inyectiva (1-1) | El agente conoce el estado exacto |
| Partially Observable | $O$ no es inyectiva | Múltiples estados producen el mismo percept |
| Non-Observable | $O(s) = c$ | El agente está “ciego” |
Ejemplo de partial observability:
En póker, ves tus cartas pero no las del oponente:
- Estado real: $(cartas_{mias}, cartas_{oponente}, cartas_{mesa})$
- Percept: $(cartas_{mias}, cartas_mesa)$
Muchos estados reales mapean al mismo percept.
Ruido en Sensores
En la práctica, los sensores son ruidosos:
$$O(s) = O_{true}(s) + \epsilon$$
Donde $\epsilon$ es ruido, típicamente modelado como:
- Gaussiano: $\epsilon \sim \mathcal{N}(0, \sigma^2)$
- Uniforme: $\epsilon \sim$ Uniform(−δ, δ)
El GPS reporta posición con error:
$$pos_{percibida} = pos_{real} + \epsilon$$
Donde $\epsilon \sim \mathcal{N}(0, \sigma^2)$ con σ ≈ 3-5 metros en condiciones normales.
Esto significa que el agente no conoce su posición exacta, solo una distribución de probabilidad sobre posibles posiciones.
Información Contenida en Percepts
El problema fundamental del agente: Está en algún estado $s \in \mathcal{S}$, pero no lo sabe directamente. Solo recibe un percept $p \in \mathcal{P}$. La pregunta es: ¿cuánto me ayuda el percept a saber en qué estado estoy?
Desde una perspectiva de teoría de información, podemos cuantificar esto. Definamos las variables:
| Variable | Significado | Descripción |
|---|---|---|
| $S$ | Variable aleatoria del estado | “¿En cuál de los estados posibles estoy?” |
| $P$ | Variable aleatoria del percept | “¿Qué percept voy a recibir?” |
| $H(S)$ | Entropía de $S$ | Incertidumbre antes de observar: “¿qué tan difícil es adivinar el estado?” |
| $H(S \mid P)$ | Entropía condicional | Incertidumbre después de observar: “dado el percept, ¿qué tan difícil sigue siendo?” |
| $I(S; P)$ | Información mutua | Reducción de incertidumbre: “¿cuánto me ayudó el percept?” |
La relación clave es:
$$I(S; P) = H(S) - H(S|P)$$
Intuición: $I(S;P)$ mide cuánta incertidumbre sobre el estado elimina el percept.
⚠️ Nota: No hemos definido formalmente entropía — lo haremos en capítulos posteriores. Por ahora, una interpretación intuitiva (simplificada, no rigurosa):
Entropía $H(S)$ ≈ “cuántas preguntas de sí/no necesitas para identificar en qué estado estás”. Si hay 8 estados equiprobables, necesitas ~3 preguntas. Si ya sabes el estado, necesitas 0 → entropía = 0.
¿Por qué 3 preguntas para 8 estados? Cada pregunta óptima divide los candidatos a la mitad:
- Pregunta 1: ¿Está en {1,2,3,4}? → quedan 4
- Pregunta 2: ¿Está en {1,2}? → quedan 2
- Pregunta 3: ¿Es el 1? → queda 1 ✓
En general: $n$ estados equiprobables → $\log_2 n$ preguntas. Es búsqueda binaria.
Información mutua $I(S;P)$ ≈ “cuántas preguntas te ahorra el percept para identificar el estado”. Si antes necesitabas 10 preguntas y después de ver el percept solo necesitas 3, el percept te “regaló” ~7 preguntas de información.
Esta intuición de “preguntas” es útil pero incompleta — la definición formal involucra probabilidades y logaritmos que veremos después.
Fully observable: $I(S;P) = H(S)$ — el percept elimina toda la incertidumbre. Después de observar, sabes exactamente en qué estado estás.
Partially observable: $I(S;P) < H(S)$ — el percept ayuda, pero queda incertidumbre. Varios estados son consistentes con lo que observaste.
Costos de Sensado
Los sensors tienen costos asociados:
| Tipo de Costo | Descripción | Ejemplo |
|---|---|---|
| Económico | Precio del sensor | LIDAR vs cámara |
| Energético | Consumo de energía | Radar activo vs pasivo |
| Computacional | Procesamiento requerido | Video HD vs baja resolución |
| Temporal | Tiempo para obtener lectura | Biopsia vs síntomas |
| De privacidad | Intrusión | Monitoreo constante |
Trade-off fundamental: Más información $\leftrightarrow$ Más costo
Ejemplo Completo: Taxi Autónomo
Formalicemos completamente un taxi autónomo:
Performance Measure
$$U = \sum_{t=0}^{T} \gamma^t \left[ w_s r_t^{(s)} + w_r r_t^{®} + w_c r_t^{©} + w_k r_t^{(k)} + w_l r_t^{(l)} \right]$$
Donde:
- $r_t^{(s)}$ = reward de seguridad, $r_t^{®}$ = rapidez, $r_t^{©}$ = comodidad, $r_t^{(k)}$ = costo, $r_t^{(l)}$ = legalidad
- Cada $r_t$ está normalizado a $[0,1]$
Environment
Estado $s \in \mathcal{S}$:
$$s = (x, y, \theta, v, {(x_i, y_i, v_i)}_{i=1}^{N}, m, c, d)$$
Donde: $(x, y, \theta, v)$ = ego vehicle, ${(x_i, y_i, v_i)}$ = otros vehículos, $m$ = mapa, $c$ = clima, $d$ = destino.
Transición (simplificada, modelo de bicicleta): $$\begin{aligned} x_{t+1} &= x_t + v_t \cos(\theta_t) \cdot \Delta t \ y_{t+1} &= y_t + v_t \sin(\theta_t) \cdot \Delta t \ \theta_{t+1} &= \theta_t + \frac{v_t}{L} \tan(\delta_t) \cdot \Delta t \ v_{t+1} &= v_t + a_t \cdot \Delta t \end{aligned}$$
Donde $L$ = distancia entre ejes, $\delta$ = ángulo de volante, $a$ = aceleración.
Actuators
$$\mathcal{A} = [-30°, 30°] \times [-8, 3] \times {0,1}$$
Donde: primer término = ángulo de volante $\delta$, segundo = aceleración en m/s², tercero = señales on/off.
Sensors
| Sensor | Output | Ruido | Costo |
|---|---|---|---|
| GPS | $(x, y) \in \mathbb{R}^2$ | $\sigma \approx 3m$ | Bajo |
| IMU | $(a_x, a_y, a_z, \omega_x, \omega_y, \omega_z)$ | $\sigma \approx 0.01$ | Bajo |
| LIDAR | Point cloud | $\sigma_r \approx 2cm$ | Alto |
| Cámaras | RGB $H \times W \times 3$ | Depende de luz | Medio |
| Radar | $(r, \dot{r}, \theta)$ | Bajo | Medio |
Observabilidad: Parcialmente observable
- No vemos intenciones de otros conductores
- Oclusiones bloquean la vista
- El futuro es incierto

Visualización: Comparando Agentes PEAS

Más Ejemplos PEAS Detallados
Sistema de Diagnóstico Médico
| Componente | Especificación | Formalización |
|---|---|---|
| P | Diagnóstico correcto, minimizar pruebas invasivas, minimizar costo | $U = w_1 \cdot acc - w_2 \cdot inv - w_3 \cdot cost$ |
| E | Paciente (síntomas, historial, genética), hospital, base de conocimiento | $s = (sint, hist, labs)$ |
| A | Solicitar pruebas, hacer preguntas, emitir diagnóstico | $\mathcal{A} = {pruebas} \cup {preguntas} \cup {dx}$ |
| S | Síntomas reportados, resultados de laboratorio, imágenes médicas | Parcialmente observable |
Robot que Recoge Partes (Pick and Place)
| Componente | Especificación | Formalización |
|---|---|---|
| P | Maximizar partes correctamente clasificadas por hora | $U = \frac{correctos}{T} - \lambda \cdot errores$ |
| E | Banda transportadora, partes de diferentes tipos, bins de destino | $s = ({(tipo_i, pos_i)}, pos, vel)$ |
| A | Mover brazo $(x,y,z,\theta)$, abrir/cerrar gripper | $\mathcal{A} = \mathbb{R}^4 \times {open, close}$ |
| S | Cámara (visión), sensores de fuerza en gripper, encoders | Ruido en visión por luz |
Tutor Inteligente de Inglés
| Componente | Especificación | Formalización |
|---|---|---|
| P | Mejorar score del estudiante, engagement, eficiencia | $U = \Delta score + w \cdot time$ |
| E | Estudiante (conocimiento, motivación, estilo), corpus de ejercicios | Estado oculto: conocimiento real |
| A | Presentar ejercicios, dar feedback, ajustar dificultad | $\mathcal{A} = {ej} \times {fb} \times [0,1]$ |
| S | Respuestas del estudiante, tiempo de respuesta, patrones de error | Solo vemos respuestas |
Completa la tabla PEAS para cada agente. Para cada uno, especifica:
- P: Métrica(s) de éxito y posibles conflictos
- E: Elementos del environment y su naturaleza
- A: Acciones disponibles (discretas/continuas)
- S: Qué puede percibir y qué queda oculto
1. Filtro de Spam
| P | E | A | S |
|---|---|---|---|
| ? | ? | ? | ? |
2. Recomendador de Netflix
| P | E | A | S |
|---|---|---|---|
| ? | ? | ? | ? |
3. Robot Aspiradora (Roomba)
| P | E | A | S |
|---|---|---|---|
| ? | ? | ? | ? |
4. Asistente Virtual (Alexa/Siri)
| P | E | A | S |
|---|---|---|---|
| ? | ? | ? | ? |
5. Sistema de Trading Algorítmico
| P | E | A | S |
|---|---|---|---|
| ? | ? | ? | ? |
Ver Respuestas Detalladas
1. Filtro de Spam
| Componente | Especificación |
|---|---|
| P | Maximizar detección de spam, minimizar falsos positivos. Trade-off: ser muy agresivo detecta más spam pero bloquea emails importantes. $U = TP - \lambda \cdot FP$ donde $\lambda > 1$. |
| E | Flujo de emails entrantes, historial del usuario, bases de datos de spam conocido, patrones de phishing. Environment dinámico: spammers evolucionan. |
| A | $\mathcal{A} = {inbox, spam, quarantine}$ — Discreto, finito. Algunas variantes permiten scoring continuo $[0,1]$. |
| S | Contenido del email (texto, HTML), headers, archivos adjuntos, reputación del dominio. Parcialmente observable: no sabe la intención del remitente. |
Formalización del trade-off:
$$\text{Precision} = \frac{TP}{TP + FP}, \quad \text{Recall} = \frac{TP}{TP + FN}$$
El filtro debe balancear precision (pocos falsos positivos) vs recall (detectar todo el spam).
2. Recomendador de Netflix
| Componente | Especificación |
|---|---|
| P | Maximizar engagement, satisfacción, retención. Conflictos: Corto plazo vs largo plazo. $U = w_1 \cdot watch + w_2 \cdot ratings + w_3 \cdot retention$ |
| E | Catálogo (~15,000 títulos), perfiles (~200M usuarios), historial, hora/día, dispositivo, trending. Multiagente. |
| A | Ordenar/seleccionar contenido, personalizar thumbnails. $\mathcal{A} = Perm(N) \times {thumbnails}$ — Espacio combinatorio enorme. |
| S | Historial, ratings, tiempo de visualización, pausas, búsquedas. Oculto: Estado emocional, si está solo o acompañado. |
El problema del cold start: Para usuarios nuevos, $historial = \emptyset$, entonces hay poca información para personalizar.
3. Robot Aspiradora (Roomba)
| Componente | Especificación |
|---|---|
| P | Maximizar área limpia, minimizar tiempo, minimizar energía. $U = \frac{area_{limpia}}{area_{total}} - w_1 \cdot t - w_2 \cdot colisiones$ |
| E | Casa/oficina con layout desconocido, muebles, alfombras, cables, mascotas, escaleras. Parcialmente observable y dinámico. |
| A | $\mathcal{A} = {fwd, left, right, suck} \times {low, high}$. Modelos avanzados: $\mathcal{A} \subset \mathbb{R}^2$. |
| S | Bumpers (contacto), cliff sensors (IR), encoders de rueda, sensor de suciedad. Modelos avanzados: LIDAR/cámara. |
Estrategias de cobertura:
- Random walk: Simple pero ineficiente, $O(n^2)$ tiempo para $n$ celdas
- Espiral + bouncing: Mejor cobertura
- SLAM + planning: Óptimo pero requiere más sensores y cómputo
4. Asistente Virtual (Alexa/Siri)
| Componente | Especificación |
|---|---|
| P | Tasa de éxito en tareas, satisfacción del usuario, tiempo de respuesta, naturalidad. Conflictos: Rápido vs correcto; privacidad vs personalización. |
| E | Usuario(s), dispositivos IoT, servicios web, ruido ambiental, múltiples hablantes. Multiagente: múltiples usuarios. |
| A | Generar voz, controlar dispositivos, llamadas, recordatorios, búsquedas. $\mathcal{A} = {resp} \times {IoT} \times {queries}$ |
| S | Audio (voz + ruido), wake word, speech-to-text, historial, contexto. Muy parcialmente observable: no ve al usuario. |
El problema de la ambigüedad:
- “Play something” → ¿Qué género? ¿Para quién?
- “Turn on the light” → ¿Cuál luz?
- “Call mom” → ¿La mamá de quién?
5. Sistema de Trading Algorítmico
| Componente | Especificación |
|---|---|
| P | Maximizar retorno ajustado por riesgo (Sharpe), minimizar drawdown. $U = \frac{E[R] - r_f}{\sigma_R}$ sujeto a $VaR < limite$. Conflicto: Retorno vs riesgo. |
| E | Mercado (precios, volúmenes, order book), noticias, datos macro, otros traders (adversarios). Altamente adversarial y estocástico. |
| A | Comprar/vender cantidades, tipos de órdenes (market, limit, stop). $\mathcal{A} = {buy, sell, hold} \times \mathbb{R}^+ \times {tipos}$. En HFT: miles/seg. |
| S | Precios real-time, volúmenes, order book, noticias (NLP), indicadores técnicos. Crucial: Latencia (μs importan en HFT). Oculto: Intenciones de otros traders. |
Formalización del riesgo:
- Volatilidad: $\sigma = \sqrt{Var®}$
- Value at Risk (VaR): Pérdida máxima con probabilidad $1-\alpha$
- Maximum Drawdown: Máxima caída desde un pico
$$\text{Sharpe Ratio} = \frac{\mu_R - r_f}{\sigma_R}$$
Un Sharpe > 2 es excelente; < 1 es mediocre.
Elige un problema que te interese y diseña un agente para resolverlo:
- Describe el problema en 2-3 oraciones
- Completa PEAS con formalización matemática donde sea posible
- Identifica trade-offs en el performance measure
- Analiza la observabilidad: ¿Qué información está oculta?
- Estima la complejidad del espacio de estados $|\mathcal{S}|$
- Propón cómo evaluarías si tu agente es “bueno”
Problemas sugeridos:
- Agente que gestiona tu calendario
- Agente que optimiza consumo de energía en casa
- Agente que modera contenido en redes sociales
- Agente que ayuda a estudiar para exámenes
- Agente que juega un videojuego específico
Quiero diseñar un agente inteligente para: [DESCRIBE TU PROBLEMA]
Ayúdame a hacer un análisis PEAS formal y matemático:
-
Performance:
- Define la función objetivo $U: \mathcal{S}^T \to \mathbb{R}$
- ¿Es un measure de estado final, acumulativo, o descontado?
- ¿Qué trade-offs existen entre objetivos?
- ¿Cómo elegirías los pesos si es multiobjetivo?
-
Environment:
- Define el espacio de estados $\mathcal{S}$
- ¿Cuál es $|\mathcal{S}|$? (finito, infinito contable, continuo)
- ¿La función de transición $T$ es determinista o estocástica?
- ¿Qué propiedades tiene? (episódico, estático, discreto, etc.)
-
Actuators:
- Define el espacio de acciones $\mathcal{A}$
- ¿Es discreto, continuo, o híbrido?
- ¿$\mathcal{A}(s)$ depende del estado?
- ¿Las acciones tienen efectos deterministas?
-
Sensors:
- Define la función de observación $O: \mathcal{S} \to \mathcal{P}$
- ¿Es fully observable ($O$ inyectiva)?
- ¿Hay ruido? ¿Cómo se modela?
- ¿Cuál es $I(S;P)$ (información disponible)?
Sé riguroso y usa notación matemática donde sea apropiado.
Por Qué PEAS es Fundamental
1. Clarifica el Problema
Sin PEAS claro:
- “Haz un bot que juegue bien” → ¿Qué significa “bien”?
- “Optimiza el sistema” → ¿Optimizar qué? ¿A costa de qué?
2. Identifica Restricciones Físicas
Los sensores y actuadores definen los límites físicos de lo que el agente puede hacer:
- Si no puede ver algo, no puede reaccionar a ello
- Si no puede actuar de cierta forma, esa opción no existe
3. Revela Trade-offs Ocultos
Al formalizar el performance measure, los conflictos se hacen explícitos:
- Seguridad vs velocidad
- Privacidad vs personalización
- Corto plazo vs largo plazo
4. Guía la Selección de Algoritmos
Las propiedades del environment determinan qué algoritmos usar:
| Si el environment es… | Entonces usa… |
|---|---|
| Fully observable, determinista | Búsqueda clásica |
| Parcialmente observable | Filtros de Bayes, POMDPs |
| Adversarial | Minimax, MCTS |
| Continuo | Control óptimo, RL continuo |
| Estocástico | MDPs, RL |
5. Define Métricas de Evaluación
El performance measure se convierte directamente en la métrica de evaluación:
- Si $U = \text{accuracy}$, medimos accuracy
- Si $U = \text{Sharpe}$, medimos Sharpe ratio
- Si $U$ es multiobjetivo, reportamos frontera de Pareto
“Si no puedes especificar PEAS formalmente, no entiendes tu problema lo suficiente para resolverlo.”
Puntos Clave
-
PEAS es el framework para especificar task environments de manera precisa y formal
-
Performance = Función objetivo $U: \mathcal{S}^T \to \mathbb{R}$
- Puede ser final, acumulativo, o descontado
- Trade-offs requieren pesos o soluciones Pareto
-
Environment = Espacio de estados $\mathcal{S}$ + dinámica $T$
- El tamaño de $\mathcal{S}$ determina la complejidad
- $T$ puede ser determinista o estocástica
-
Actuators = Espacio de acciones $\mathcal{A}$
- Discreto, continuo, o híbrido
- Define lo que el agente puede hacer
-
Sensors = Función de observación $O: \mathcal{S} \to \mathcal{P}$
- Determina observabilidad
- Ruido y costos son consideraciones reales
-
Especificar PEAS formalmente es el primer y más importante paso del diseño de agentes