Algoritmos de optimización: intuiciones
Esta sección da una vista panorámica de los algoritmos más importantes. No vamos a derivar nada formalmente — la meta es construir intuición sobre cuándo y por qué funciona cada método.
Descenso de gradiente (sin restricciones)
La idea más simple y poderosa: camina cuesta abajo.
$$x_{k+1} = x_k - \alpha \nabla f(x_k)$$
donde $\alpha > 0$ es el learning rate (tasa de aprendizaje).
Intuición
- $\nabla f(x_k)$ apunta en la dirección de mayor crecimiento de $f$.
- El negativo $-\nabla f(x_k)$ apunta “cuesta abajo”.
- $\alpha$ controla el tamaño del paso.
El learning rate importa mucho
| $\alpha$ muy pequeño | $\alpha$ muy grande |
|---|---|
| Convergencia lenta pero segura | Puede divergir (oscilar o explotar) |
| Muchos pasos para llegar | Pocos pasos pero inestable |
Criterios de convergencia — ¿cuándo parar?
Descenso de gradiente es iterativo: ¿cómo sabemos que ya llegamos? Tres criterios comunes:
- Norma del gradiente: $|\nabla f(x_k)| < \varepsilon$ — “el terreno es casi plano”
- Cambio en la función: $|f(x_{k+1}) - f(x_k)| < \varepsilon$ — “ya no mejoramos”
- Cambio en parámetros: $|x_{k+1} - x_k| < \varepsilon$ — “ya no nos movemos”
En scipy.optimize.minimize, estos criterios se reflejan (dependiendo del método) en tolerancias como gtol, ftol y xtol. En la práctica, SciPy combina varios criterios y algunos métodos ignoran ciertas tolerancias.
En la práctica de ML, es común usar un número fijo de épocas (por ejemplo, “entrena 100 épocas”). Esto no es principiado — puedes estar parando demasiado pronto o demasiado tarde — pero es simple y predecible.
Supuestos formales
- $f$ es diferenciable (necesitamos $\nabla f$)
- El gradiente es Lipschitz continuo con constante $L$: $|\nabla f(x) - \nabla f(y)| \leq L|x - y|$
- Para garantía de óptimo global: $f$ es convexa
- Para tasa de convergencia lineal: $f$ es fuertemente convexa ($\mu > 0$)
Cuándo funciona / qué garantiza (y cuándo NO)
- Funciona bien si:
- (f) es suave (diferenciable) y el problema es convexo o “casi convexo”.
- el problema no está extremadamente mal condicionado (curvaturas no demasiado disparejas), o puedes re-escalar variables.
- puedes escoger un (\alpha) estable (o usar line search / schedule).
- Qué te garantiza:
- En general: te lleva a un punto donde el gradiente es pequeño ((|\nabla f|\approx 0)).
- Óptimo global solo si (f) es convexa (y (\alpha) es apropiado).
- Convergencia particularmente buena si (f) es fuertemente convexa.
- Cuándo NO:
- Si (f) es no convexa, no hay garantía de llegar al óptimo global (puede caer en un mínimo local o cerca de un punto silla).
- Si (f) no es diferenciable, GD “puro” no aplica (necesitas subgradientes o reformulación).
- Si el problema está muy mal condicionado, GD puede ser desesperadamente lento (ahí suele ganar L-BFGS / Newton / precondicionamiento).
Ventajas y desventajas
| Ventajas | Desventajas |
|---|---|
| Simple: $O(n)$ por iteración | Ignora curvatura (solo primer orden) |
| Convergencia garantizada si $f$ es convexa y $\alpha < 2/L$ | Sensible al learning rate |
| Base de todos los optimizadores de deep learning | Se atasca en mínimos locales (no convexo) |
| Fácil de implementar y paralelizar | Lento en problemas mal condicionados |
Dónde se usa
- Entrenamiento de modelos lineales (regresión, clasificación)
- Base de todos los optimizadores de DL (SGD, Adam, AdaGrad)
- Cualquier problema diferenciable sin restricciones como primer intento
Notebook — Abre NB2, Secciones 1-3: GD y learning rates
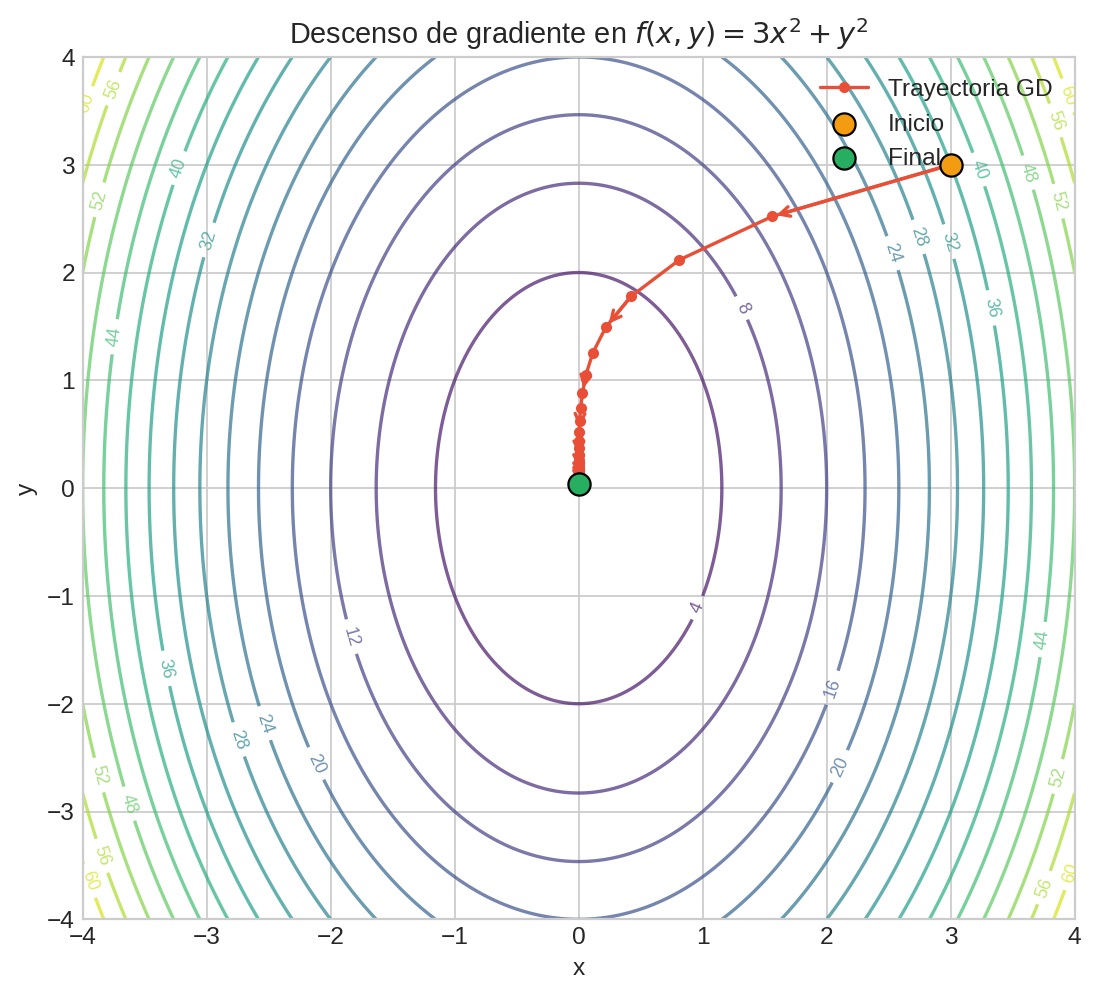
- Ejecuta GD en la cuadrática con
lr=0.08. ¿Cuántos pasos necesita para converger?- Prueba
lr=0.33vslr=0.34en $f(x,y) = 3x^2 + y^2$. ¿Qué pasa?- El learning rate crítico es $\alpha_{\text{crit}} = 2/L_{\max}$ donde $L_{\max}$ es el eigenvalor más grande del Hessiano. Para $3x^2 + y^2$, $L_{\max} = 6$, así que $\alpha_{\text{crit}} = 1/3 \approx 0.333$.
Descenso de gradiente estocástico (SGD)
En ML, la función objetivo es típicamente una suma sobre datos:
$$f(x) = \frac{1}{N} \sum_{i=1}^{N} f_i(x)$$
El gradiente completo es costoso: hay que evaluar $f_i$ para cada dato. Con millones de muestras, una sola iteración de GD es prohibitiva.
Idea de SGD: El gradiente completo es una esperanza: $\nabla f(x) = \mathbb{E}_i[\nabla f_i(x)]$. Podemos estimarlo con un subconjunto aleatorio (mini-batch) de $B$ muestras:
$$x_{k+1} = x_k - \alpha \frac{1}{|B|} \sum_{i \in B} \nabla f_i(x_k)$$
El gradiente estimado es ruidoso, pero en promedio apunta en la dirección correcta.
¿Por qué funciona el ruido?
- Ventaja: El ruido ayuda a escapar puntos silla y mínimos locales poco profundos. Un gradiente ruidoso puede “sacudir” al algoritmo fuera de una trampa (recuerda la discusión de puntos silla en la sección de paisaje).
- Costo: La convergencia es más ruidosa — la trayectoria zigzaguea en lugar de descender suavemente.
Learning rate schedules
Con SGD, el learning rate importa aún más:
- Constante: simple pero puede oscilar eternamente cerca del óptimo
- Decay: $\alpha_k = \alpha_0 / (1 + k \cdot d)$ — reduce el ruido gradualmente
- Warmup: empieza pequeño, sube, y luego baja — estabiliza el inicio del entrenamiento
Adam: el optimizador por defecto
Adam: el optimizador por defecto en deep learning
Adam (Adaptive Moment Estimation) adapta el learning rate por parámetro usando estimados del primer y segundo momento del gradiente. Intuitivamente: parámetros con gradientes consistentes reciben pasos grandes; parámetros con gradientes erráticos reciben pasos pequeños.
La regla de actualización:
$$m_t = \beta_1 m_{t-1} + (1 - \beta_1) g_t \qquad \text{(media móvil del gradiente)}$$
$$v_t = \beta_2 v_{t-1} + (1 - \beta_2) g_t^2 \qquad \text{(media móvil del gradiente}^2\text{)}$$
$$\hat{m}_t = \frac{m_t}{1 - \beta_1^t}, \quad \hat{v}_t = \frac{v_t}{1 - \beta_2^t} \qquad \text{(corrección de sesgo)}$$
$$\theta_{t+1} = \theta_t - \frac{\alpha}{\sqrt{\hat{v}_t} + \varepsilon} \hat{m}_t$$
Valores por defecto: $\beta_1 = 0.9$, $\beta_2 = 0.999$, $\varepsilon = 10^{-8}$. Adam es el optimizador por defecto en deep learning moderno, aunque no tiene garantía de convergencia en todos los casos convexos (a diferencia de SGD con decay).
Supuestos formales (SGD/Adam)
- La función objetivo tiene estructura de suma: $f = \frac{1}{N}\sum f_i$
- El gradiente del mini-batch es un estimador insesgado: $\mathbb{E}[\nabla f_B] = \nabla f$
- La varianza del gradiente es acotada: $\text{Var}[\nabla f_B] \leq \sigma^2$
- Para convergencia teórica de SGD: learning rate decreciente ($\sum \alpha_k = \infty$, $\sum \alpha_k^2 < \infty$)
Cuándo funciona / qué garantiza (y cuándo NO)
- Funciona bien si:
- (N) es grande y el gradiente completo es caro.
- tu objetivo es un promedio sobre datos (la estructura (\frac1N\sum f_i)).
- aceptas ruido a cambio de actualizaciones baratas.
- Qué te garantiza (en teoría):
- En problemas convexos, con learning rate decreciente, SGD converge (bajo supuestos estándar).
- Qué NO te garantiza:
- En problemas no convexos (deep learning), no hay certificado de óptimo global: se usa porque funciona bien en práctica.
- Adam no tiene las mismas garantías teóricas que SGD con decay en todos los casos convexos.
- Cuándo NO:
- Si (N) es pequeño y (f) es suave/determinista, métodos batch (GD) o cuasi-Newton (L-BFGS) suelen ser mejores.
- Si (f) es muy sensible al ruido, un batch muy chico puede hacer que “no asiente” cerca del óptimo sin un buen schedule.
Ventajas y desventajas
| Ventajas | Desventajas |
|---|---|
| $O(B)$ por iteración (no depende de $N$) | Convergencia ruidosa |
| Escala a miles de millones de muestras | Necesita schedule de learning rate |
| El ruido ayuda a escapar puntos silla | Oscila con learning rate constante |
| Adam adapta lr por parámetro automáticamente | Adam: sin garantía de convergencia en todos los casos convexos |
Dónde se usa
- Todo entrenamiento de redes neuronales (CNNs, transformers, LLMs)
- Sistemas de recomendación a gran escala
- Cualquier problema donde $N$ es tan grande que el gradiente completo es prohibitivo
Notebook — Abre NB2, Sección SGD: SGD vs batch GD
- Compara las curvas de convergencia de GD completo vs SGD en regresión lineal sintética.
- ¿Cuál converge más rápido en tiempo de reloj? ¿Cuál tiene trayectoria más suave?
- Cambia el tamaño del mini-batch. ¿Qué pasa con batch_size=1 vs batch_size=N?
Métodos de segundo orden — intuición
Descenso de gradiente usa información de primer orden (la pendiente). ¿Qué pasa si también usamos la curvatura?
Newton’s method
El método de Newton usa el Hessiano $H$ (matriz de segundas derivadas) para tomar pasos más inteligentes:
$$x_{k+1} = x_k - H^{-1} \nabla f(x_k)$$
Intuición: GD camina a velocidad constante en todas las direcciones. Newton toma pasos grandes en direcciones planas (poca curvatura) y pequeños en direcciones empinadas (mucha curvatura). Es como ajustar el learning rate automáticamente por dirección.
El problema: el costo
Calcular $H^{-1}$ cuesta $O(n^3)$ donde $n$ es el número de parámetros. Para una red neuronal con millones de parámetros, esto es imposible.
L-BFGS: lo mejor de dos mundos
L-BFGS (Limited-memory BFGS) aproxima $H^{-1}$ usando solo el historial reciente de gradientes. No requiere calcular el Hessiano completo — solo guarda los últimos ~10 gradientes y hace una aproximación.
Por eso scipy.optimize.minimize con method='L-BFGS-B' destruye a nuestro GD casero en Rosenbrock: usa información de curvatura aproximada para navegar el valle banana eficientemente.
Supuestos formales (Newton)
- $f$ es dos veces diferenciable
- El Hessiano $H$ es invertible y positivo definido (al menos cerca del óptimo)
- Hessiano Lipschitz para convergencia cuadrática
- $x_0$ debe estar cerca del óptimo (convergencia local, no global)
Cuándo funciona / qué garantiza (y cuándo NO)
- Funciona bien si:
- el problema es suave y de tamaño chico/mediano (o puedes aproximar curvatura).
- ya estás cerca del óptimo (Newton es espectacular en la fase final).
- Qué te garantiza:
- Newton: convergencia local muy rápida si el Hessiano es PD cerca del óptimo.
- L-BFGS-B: típicamente converge mucho mejor que GD en problemas mal condicionados, pero sigue sin “certificado global” en no convexos.
- Cuándo NO / trampas típicas:
- Si (f) es lineal, el Hessiano es cero y Newton no aplica (para objetivos lineales, lo correcto es LP: simplex/HiGHS).
- Si el Hessiano no es PD (o estás lejos del óptimo), Newton puede divergir sin damping/line search.
- En settings estocásticos (SGD), la curvatura estimada es ruidosa y cuasi-Newton suele ser mala idea.
Ventajas y desventajas (Newton)
| Ventajas | Desventajas |
|---|---|
| Convergencia cuadrática (extremadamente rápida cerca del óptimo) | $O(n^3)$ por iteración (inversión del Hessiano) |
| No necesita learning rate | Diverge lejos del óptimo |
| Invariante al condicionamiento del problema | Necesita $H$ positivo definido |
Supuestos formales (L-BFGS-B)
- $f$ tiene gradiente suave (diferenciable)
- Almacena $m \sim 10$ pares de gradientes para aproximar $H^{-1}$
Ventajas y desventajas (L-BFGS-B)
| Ventajas | Desventajas |
|---|---|
| Convergencia quasi-Newton a costo $O(mn)$ | Necesita gradiente suave |
| Maneja cotas (bounds) en variables | No apto para settings estocásticos |
Default de scipy.optimize.minimize |
Menos robusto que Newton puro cerca del óptimo |
Dónde se usan (segundo orden)
- Newton: Calibración de modelos pequeños/medianos, optimización de portafolios, computación científica
- L-BFGS-B: Default de scipy, regresión logística en scikit-learn, modelos de NLP con features clásicas
Notebook — Abre NB2, Secciones 4 y 6: Rosenbrock
- Ejecuta GD en Rosenbrock con 5000 pasos. ¿Qué tan cerca llega del óptimo (1,1)?
- Compara con
scipy.optimize.minimize(L-BFGS-B). ¿Cuántas evaluaciones necesita?- ¿Por qué L-BFGS-B gana? Porque usa información de curvatura (segundo orden).
Multiplicadores de Lagrange (restricciones de igualdad)
¿Cómo minimizas $f(x)$ cuando $x$ debe estar sobre una superficie $h(x) = 0$?
Intuición geométrica: en el óptimo, el gradiente de $f$ es paralelo al gradiente de $h$. Si no fueran paralelos, podrías moverte a lo largo de la restricción y seguir bajando.
$$\nabla f(x^{∗}) = \lambda \nabla h(x^{∗})$$
Esto se formaliza con el Lagrangiano:
$$\mathcal{L}(x, \lambda) = f(x) + \lambda , h(x)$$
El óptimo se encuentra resolviendo $\nabla_x \mathcal{L} = 0$ y $\nabla_\lambda \mathcal{L} = 0$ (que equivale a $h(x) = 0$).
Qué resuelve (y qué NO resuelve)
- Resuelve: restricciones de igualdad (h_i(x)=0) (una o varias), con funciones diferenciables.
- NO resuelve directamente:
- desigualdades (g(x)\le 0) → necesitas KKT (multiplicadores (\mu\ge 0) + holgura complementaria).
- restricciones o objetivos no diferenciables (sin subgradientes/reformulación).
- Ojo: “resolver las ecuaciones de Lagrange” produce candidatos; todavía falta verificar que sea mínimo y que el problema esté acotado.
Ejemplo trabajado
$\min \quad x^2 + y^2 \quad$ sujeto a $\quad x + y = 1$
Lagrangiano: $\mathcal{L}(x, y, \lambda) = x^2 + y^2 + \lambda(x + y - 1)$
Ver Solución
Condiciones de primer orden:
$$ \begin{aligned} \frac{\partial \mathcal{L}}{\partial x} &= 2x + \lambda = 0 \quad \Rightarrow \quad x = -\lambda/2 \ \frac{\partial \mathcal{L}}{\partial y} &= 2y + \lambda = 0 \quad \Rightarrow \quad y = -\lambda/2 \ \frac{\partial \mathcal{L}}{\partial \lambda} &= x + y - 1 = 0 \end{aligned} $$
De las dos primeras: $x = y$. Sustituyendo en la tercera: $2x = 1 \Rightarrow x = y = 1/2$.
Solución: $(x^{∗}, y^{∗}) = (1/2, 1/2)$, con $f^{∗} = 1/2$.
Conexión con módulo 06: Los multiplicadores de Lagrange aparecen también en la derivación de la distribución de máxima entropía (MaxEnt de Jaynes). Allí, maximizas entropía sujeto a restricciones de momentos — exactamente la misma estructura.
Supuestos formales
- $f$ y $h_i$ son diferenciables
- LICQ (Linear Independence Constraint Qualification): los gradientes de las restricciones activas son linealmente independientes
- Suficiencia de segundo orden para confirmar que es un mínimo (no máximo ni silla)
Cuándo funciona / qué garantiza (y cuándo NO)
- Qué te da Lagrange, exactamente:
- Las ecuaciones (\nabla_x \mathcal{L}=0) y (h(x)=0) son condiciones necesarias para optimalidad bajo calificaciones de restricciones (como LICQ).
- No son suficientes en general: pueden describir un máximo o un punto silla. En problemas no convexos debes comprobar segundo orden o comparar valores.
- Cuándo “siempre encuentra el óptimo”:
- Si estás minimizando una (f) convexa con restricciones de igualdad afines ((h(x)=Ax-b)), entonces cualquier punto que satisface KKT/Lagrange (y factibilidad) es óptimo global.
- Cuándo NO (casos comunes):
- No convexo: puede devolverte un punto crítico que no es óptimo global.
- LICQ falla (restricciones redundantes/dependientes): los multiplicadores pueden no existir o no ser únicos; las condiciones se vuelven más delicadas.
- No acotado: puede no existir mínimo (no hay “mejor” solución).
- ¿Qué pasa si el objetivo es lineal?
- Con solo igualdades (Ax=b), un objetivo lineal (c^Tx) suele ser no acotado (puedes irte al (\pm\infty) a lo largo de direcciones que preservan (Ax=b)).
- Para que exista óptimo normalmente necesitas cotas o desigualdades → eso ya es el mundo de LP (simplex/HiGHS) y dualidad.
Ventajas y desventajas
| Ventajas | Desventajas |
|---|---|
| Da soluciones analíticas para problemas pequeños | Solo maneja restricciones de igualdad |
| Interpretación económica: $\lambda$ es el precio sombra | Difícil de resolver analíticamente en alta dimensión |
| Fundamento de dualidad (SVM, MaxEnt) | No aplica directamente a desigualdades |
Dónde se usa
- Derivación de MaxEnt (módulo 06)
- Formulación del dual de SVM
- Economía (maximización de utilidad con restricción de presupuesto)
- Física (mecánica analítica, principio de mínima acción)
Notebook — Abre NB2: Lagrange
- Verifica que scipy confirma la solución analítica $(0.5, 0.5)$.
- Cambia la restricción a $x + y = 2$. ¿Cómo cambia la solución?
- Observa los contornos: el óptimo está donde la restricción es tangente a una curva de nivel.
Dualidad (primal vs dual): el caso de programación lineal
La dualidad es una idea central: en vez de optimizar directamente sobre las variables “del problema” (el primal), puedes construir otro problema (el dual) cuyas variables son los multiplicadores/“precios” de las restricciones.
Primal y dual en LP (forma estándar)
Considera el primal:
$$ \text{(P)}\quad \max ; p^T x \quad \text{s.t.}\quad Ax \le b,\quad x \ge 0 $$
Su dual es:
$$ \text{(D)}\quad \min ; b^T y \quad \text{s.t.}\quad A^T y \ge p,\quad y \ge 0 $$
Interpretación: (y_i) es el precio sombra (valor marginal) del recurso (i).
¿Por qué importa?
- Dualidad débil (weak duality): para cualquier (x) factible y cualquier (y) factible, [ p^T x \le b^T y ] Es decir: el dual da una cota superior para el valor del primal (cuando el primal es de maximización).
- Dualidad fuerte (strong duality): en programación lineal (y en convexos “bien portados”), en el óptimo se cumple [ p^T x^* = b^T y^* ] No hay “gap” primal-dual.
Conexión con KKT (holgura complementaria)
En LP, KKT se reduce a factibilidad primal/dual + holgura complementaria:
- (y_i,(b_i - (Ax)_i) = 0) (si una restricción no es activa, su precio es 0)
- (x_j,((A^T y)_j - p_j) = 0) (si una variable es positiva, su desigualdad dual está “apretada”)
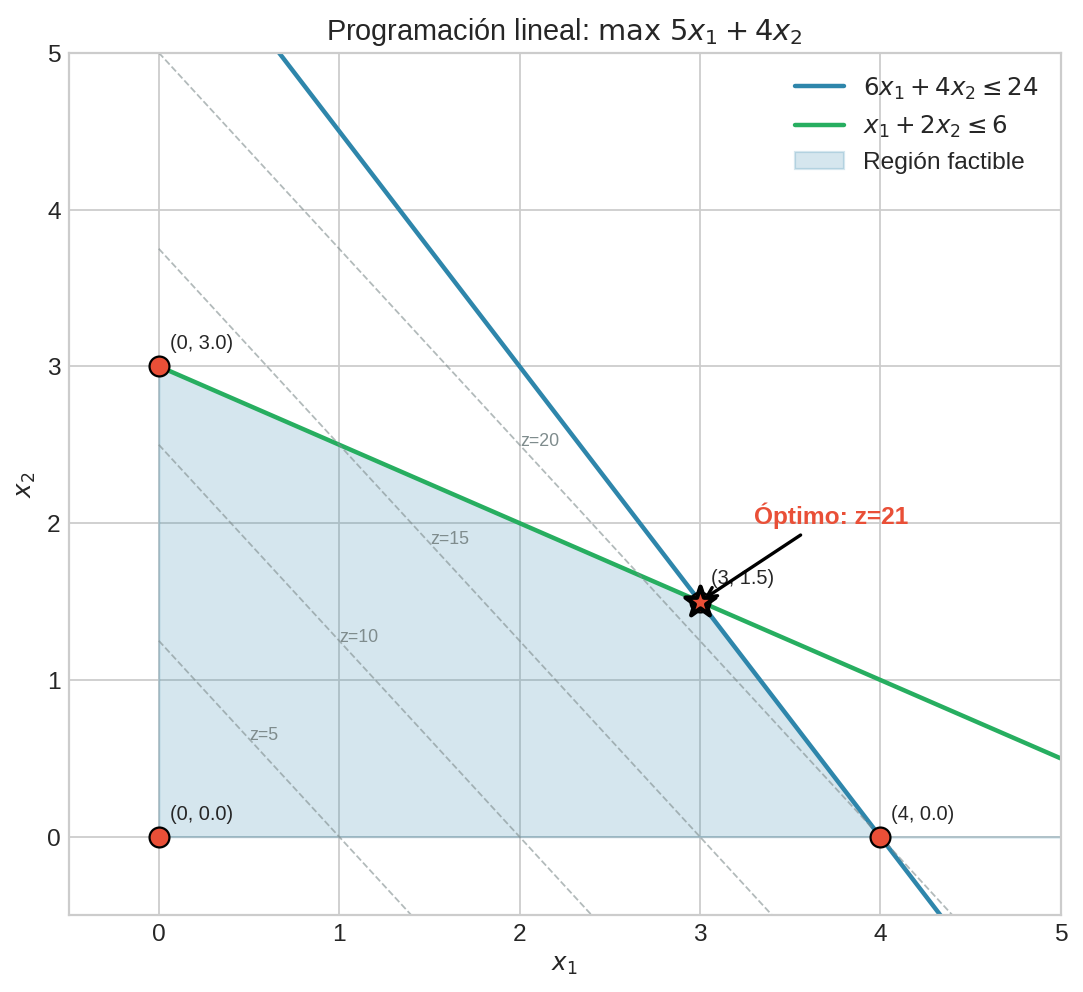
Ejemplo: producción (el del módulo)
Primal:
$$ \max; 5x_1 + 4x_2;;\text{s.t.};; 6x_1 + 4x_2 \le 24,;; x_1 + 2x_2 \le 6,;; x_1,x_2 \ge 0 $$
Dual:
$$ \min; 24y_1 + 6y_2;;\text{s.t.};; 6y_1 + y_2 \ge 5,;; 4y_1 + 2y_2 \ge 4,;; y_1,y_2 \ge 0 $$
- (y_1): precio sombra del recurso A (la restricción (6x_1 + 4x_2 \le 24))
- (y_2): precio sombra del recurso B (la restricción (x_1 + 2x_2 \le 6))
Si aumentas un poquito (b_1) (más recurso A), el óptimo del primal típicamente aumenta ~(y_1^* \cdot \Delta b_1). En el notebook lo verificamos numéricamente y lo visualizamos en 2D.
Condiciones KKT (restricciones de desigualdad)
Las condiciones de Karush-Kuhn-Tucker extienden Lagrange a restricciones de desigualdad $g_j(x) \leq 0$.
Intuición: “Lagrange + restricciones activas/inactivas”.
El Lagrangiano generalizado es:
$$\mathcal{L}(x, \lambda, \mu) = f(x) + \sum_i \lambda_i h_i(x) + \sum_j \mu_j g_j(x)$$
Las condiciones KKT agregan una condición clave — holgura complementaria:
$$\mu_j , g_j(x) = 0 \quad \text{para todo } j$$
Esto dice: para cada restricción de desigualdad, o la restricción está activa ($g_j = 0$, y $\mu_j$ puede ser positivo) o está inactiva ($g_j < 0$, y $\mu_j = 0$, “no importa”). Nunca ambas.
Las 4 condiciones KKT
Para el problema $\min f(x)$ s.t. $g_j(x) \leq 0$, $h_i(x) = 0$:
- Estacionariedad: $\nabla f(x^{∗}) + \sum_i \lambda_i \nabla h_i(x^{∗}) + \sum_j \mu_j \nabla g_j(x^{∗}) = 0$
- Factibilidad primal: $h_i(x^{∗}) = 0$, $g_j(x^{∗}) \leq 0$
- Factibilidad dual: $\mu_j \geq 0$
- Holgura complementaria: $\mu_j g_j(x^{∗}) = 0$
Ejemplo trabajado: el problema de transporte (capstone)
Consideremos $\min 2x_1^2 + 3x_2^2 + x_1 x_2$ sujeto a $-(x_1 + x_2 - 10) \leq 0$ (es decir, $x_1 + x_2 \geq 10$), con $x_1, x_2 \geq 0$.
Ver las 4 condiciones KKT
Reescribimos: $g(x) = -(x_1 + x_2 - 10) = -x_1 - x_2 + 10 \leq 0$
-
Estacionariedad: $\nabla f + \mu \nabla g = 0$
- $4x_1 + x_2 - \mu = 0$
- $6x_2 + x_1 - \mu = 0$
-
Factibilidad primal: $-x_1 - x_2 + 10 \leq 0$ → $x_1 + x_2 \geq 10$
-
Factibilidad dual: $\mu \geq 0$
-
Holgura complementaria: $\mu(-x_1 - x_2 + 10) = 0$
Si la restricción está activa ($x_1 + x_2 = 10$), de (1): $4x_1 + x_2 = 6x_2 + x_1$ → $3x_1 = 5x_2$ → $x_1 = 6.25$, $x_2 = 3.75$, $\mu = 28.75 > 0$ ✓
Supuestos formales
- $f$, $g_j$, $h_i$ son diferenciables
- Condición de Slater (caso convexo): existe un punto estrictamente factible para las desigualdades
- En el caso general: LICQ u otra calificación de restricciones
- $\mu_j \geq 0$ para todas las desigualdades
Cuándo funciona / qué garantiza (y cuándo NO)
- Qué son KKT:
- Son condiciones que caracterizan candidatos óptimos con igualdades + desigualdades.
- Como en Lagrange, suelen ser necesarias bajo calificaciones de restricciones, pero no siempre suficientes.
- Cuándo sí te dan un “certificado”:
- Si el problema es convexo (objetivo convexa, restricciones convexas) y se cumple Slater, entonces KKT es suficiente y describe el óptimo global.
- Cuándo NO:
- En no convexos, cumplir KKT no implica óptimo global (puede ser local o incluso un punto indeseable).
- Si no hay factibilidad o fallan las calificaciones de restricciones, KKT puede no aplicar limpiamente.
Dónde se usa
- Métodos de puntos interiores (solvers modernos de LP/QP)
- Derivación de la formulación dual de SVM
- Fundamento teórico de todo solver con restricciones de desigualdad
Método simplex (programación lineal)
Para problemas lineales ($\min c^T x$ sujeto a $Ax \leq b$, $x \geq 0$), hay una estructura especial:
- La región factible es un politopo (poliedro acotado).
- El óptimo siempre está en un vértice del politopo.
El método simplex (Dantzig, 1947) camina de vértice en vértice, siempre mejorando el objetivo, hasta llegar al óptimo. Es extraordinariamente eficiente en la práctica, aunque teóricamente puede ser exponencial en el peor caso.
Supuestos formales
- Objetivo y restricciones son lineales
- La región factible es no vacía y acotada (o al menos el óptimo existe)
Cuándo funciona / qué garantiza (y cuándo NO)
- Funciona bien si:
- el problema es realmente un LP (todo lineal, con desigualdades y cotas).
- quieres solución exacta (óptimo global) y diagnóstico de infeasible/unbounded.
- Qué te garantiza:
- Si el LP es factible y acotado, simplex/HiGHS encuentra el óptimo global.
- Si no lo es, el solver típicamente certifica infeasible o unbounded.
- Cuándo NO:
- Si hay no linealidades (usa otros métodos o reformula).
- Si hay variables enteras (eso ya es IP/MIP: branch-and-bound /
milp).
Ventajas y desventajas
| Ventajas | Desventajas |
|---|---|
| Solución exacta (no aproximada) | Solo problemas lineales |
| Muy rápido en la práctica | Peor caso exponencial |
| Décadas de implementaciones maduras (HiGHS, CPLEX, Gurobi) | Degeneración puede causar ciclado |
Dónde se usa
- Logística y transporte (ruteo, asignación)
- Planificación de producción
- Scheduling de aerolíneas
- Asignación de recursos en telecomunicaciones
Notebook — Abre NB2:
linprog
- Resuelve el problema de producción con
linprog. La solución está en un vértice.- Cambia
b_ub(recursos disponibles). ¿La solución se mueve a otro vértice?- Cambia
c(ganancias). ¿La solución salta a un vértice diferente?
Metaheurísticas: cuando no hay gradiente
A veces no puedes (o no quieres) calcular gradientes: la función es ruidosa, discontinua, o de caja negra. Ahí entran las metaheurísticas — algoritmos que solo necesitan evaluar $f(x)$, no su derivada.
Cuándo funcionan / qué (no) garantizan
- Funciona bien si:
- tu función es caja negra (no hay gradiente) o es discontinua/ruidosa.
- tienes un dominio acotado y puedes permitir muchas evaluaciones de (f(x)).
- Qué NO garantizan:
- no dan certificados de optimalidad (no te dicen “esto es el óptimo global”).
- no hay garantía práctica de encontrar el global en tiempo razonable.
- Cuándo NO:
- si tienes gradiente y el problema es suave, casi siempre conviene GD/L-BFGS/solvers convexos.
- si evaluar (f) es muy caro, se vuelven prohibitivas.
Simulated Annealing (recocido simulado)
Intuición
Imagina que buscas el punto más bajo de una cordillera de noche (no puedes ver el paisaje completo). Al principio saltas a sitios aleatorios — incluso si son más altos — para explorar. Conforme pasa el tiempo, te vuelves más selectivo: solo aceptas movimientos que bajan. Este balance entre exploración (alta temperatura) y explotación (baja temperatura) es la esencia de SA.
El nombre viene de la metalurgia: al calentar un metal y enfriarlo lentamente, los átomos encuentran configuraciones de baja energía. Si enfrías demasiado rápido, el metal queda frágil (mínimo local); enfriando lento, encuentras la estructura cristalina óptima (mínimo global).
Algoritmo
- Elige un punto inicial $x_0$ y una temperatura inicial $T_0$ alta
- Genera vecino: $x’ = x + \text{perturbación aleatoria}$
- Calcula $\Delta = f(x’) - f(x)$
- Decide:
- Si $\Delta < 0$ (mejora): acepta $x’ $ siempre
- Si $\Delta \geq 0$ (empeora): acepta con probabilidad $p = e^{-\Delta / T}$ (criterio de Metropolis)
- Enfría: $T \leftarrow \alpha \cdot T$ (típicamente $\alpha \in [0.9, 0.999]$)
- Repite hasta que $T$ sea suficientemente baja o se agoten las iteraciones
Supuestos formales
- Solo necesitas evaluar $f(x)$ — caja negra (no gradiente)
- La vecindad debe ser ergódica: desde cualquier punto, eventualmente puedes llegar a cualquier otro
- Convergencia teórica al global solo con enfriamiento logarítmico ($T_k \propto 1/\log k$), que es imprácticamente lento
Cuándo usarlo / qué esperar
- Úsalo si: no hay gradiente, hay muchos mínimos locales, y buscas una solución “buena” sin estructura analítica.
- No esperes: un certificado de óptimo global (en práctica), ni eficiencia si el problema es suave con gradiente disponible.
- Se rompe típicamente por: enfriamiento demasiado rápido (se queda en local) o demasiado lento (tarda demasiado).
Ventajas y desventajas
| Ventajas | Desventajas |
|---|---|
| No necesita gradiente | Más lento que métodos de gradiente cuando estos aplican |
| Escapa mínimos locales (al inicio) | Sensible al schedule de temperatura ($T_0$, $\alpha$) |
| Simple de implementar (~20 líneas) | Un solo agente (no paralelizable trivialmente) |
| Funciona con funciones discontinuas, ruidosas, combinatorias | Sin garantía práctica de convergencia |
Dónde se usa
- Diseño de circuitos VLSI (placement & routing)
- Problema del viajante (TSP)
- Scheduling y planificación
- Calibración de modelos de simulación
- En scipy:
scipy.optimize.dual_annealing(versión mejorada)
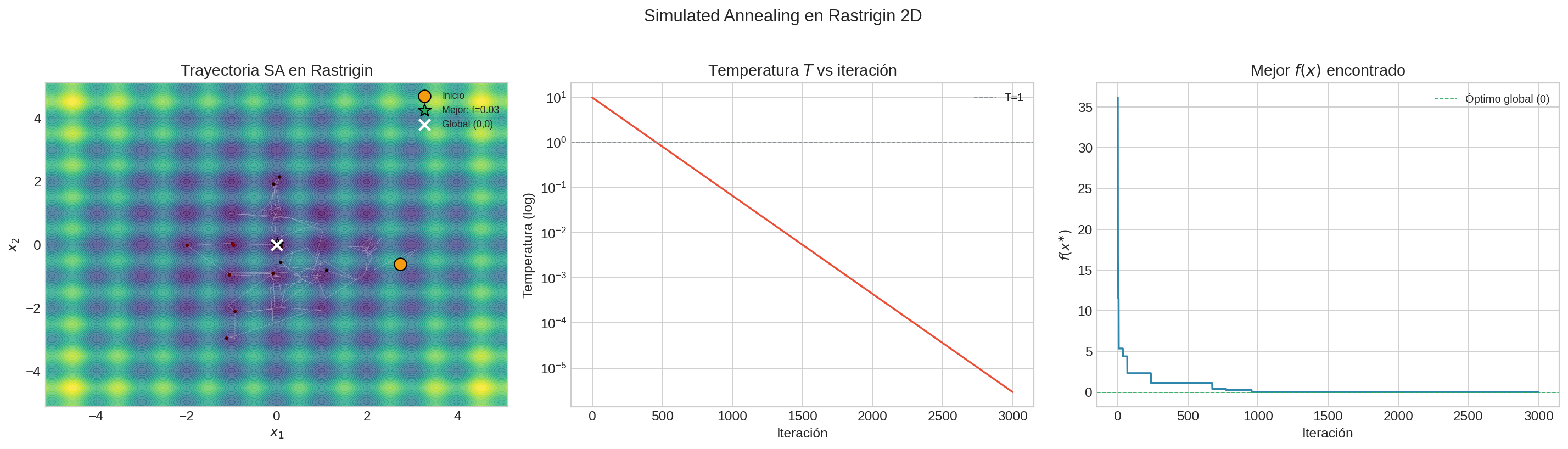
Notebook — Abre NB2, Secciones SA
- Implementa SA desde cero en la función de Rastrigin (muchos mínimos locales, global en el origen).
- Visualiza la trayectoria, la temperatura, y la convergencia.
- Varía $T_0$ y $\alpha$. ¿Qué pasa si enfrías muy rápido?
- Compara con
scipy.optimize.dual_annealing.
Algoritmos Genéticos (GA)
Intuición
Imagina una población de soluciones que evoluciona. Las mejores soluciones (“las más aptas”) tienen más probabilidad de reproducirse. Al combinar dos buenas soluciones (crossover) y agregar variación aleatoria (mutación), la población mejora generación tras generación. Después de muchas generaciones, la mejor solución de la población está cerca del óptimo global.
Algoritmo
- Inicializa una población de $N$ soluciones aleatorias
- Evalúa fitness (= $f(x)$) de cada individuo
- Selección: elige padres con probabilidad proporcional a su fitness (o por torneo)
- Crossover: combina dos padres para crear hijos (mezcla de sus “genes”)
- Mutación: perturba algunos hijos aleatoriamente (diversidad)
- Reemplazo: la nueva generación reemplaza a la anterior (con elitismo: el mejor individuo siempre sobrevive)
- Repite desde el paso 2 por $G$ generaciones
Supuestos formales
- Solo necesitas evaluar fitness — caja negra (igual que SA)
- Necesitas una representación adecuada del individuo (“cromosoma”) para el problema
- Los operadores de crossover y mutación deben ser compatibles con la representación
- Elitismo (conservar al mejor) garantiza que el fitness nunca empeora entre generaciones
Cuándo usarlo / qué esperar
- Úsalo si: el espacio de búsqueda es grande, multimodal, o combinatorio/discreto, y quieres exploración en “población”.
- No esperes: convergencia rápida en problemas suaves con gradiente (GD/L-BFGS ganan), ni certificados de optimalidad.
- Se rompe típicamente por: mala representación, poca diversidad (convergencia prematura) o demasiados hiperparámetros mal ajustados.
Ventajas y desventajas
| Ventajas | Desventajas |
|---|---|
| La población explora en paralelo (múltiples regiones) | Muchas evaluaciones de $f$ ($N \times G$) |
| Natural para problemas discretos/combinatorios | Muchos hiperparámetros ($N$, $p_m$, tipo de selección, crossover) |
| Robusto ante ruido y multimodalidad | Ignora estructura del problema |
| No necesita gradiente | Lento para funciones suaves donde GD gana |
Dónde se usa
- Diseño de antenas (NASA usó GA para optimizar la antena de la misión ST5)
- Scheduling y planificación combinatoria
- Neural Architecture Search (NAS): buscar la mejor arquitectura de red neuronal
- Optimización de portafolios con restricciones complejas
- En scipy:
scipy.optimize.differential_evolution(variante evolutiva)
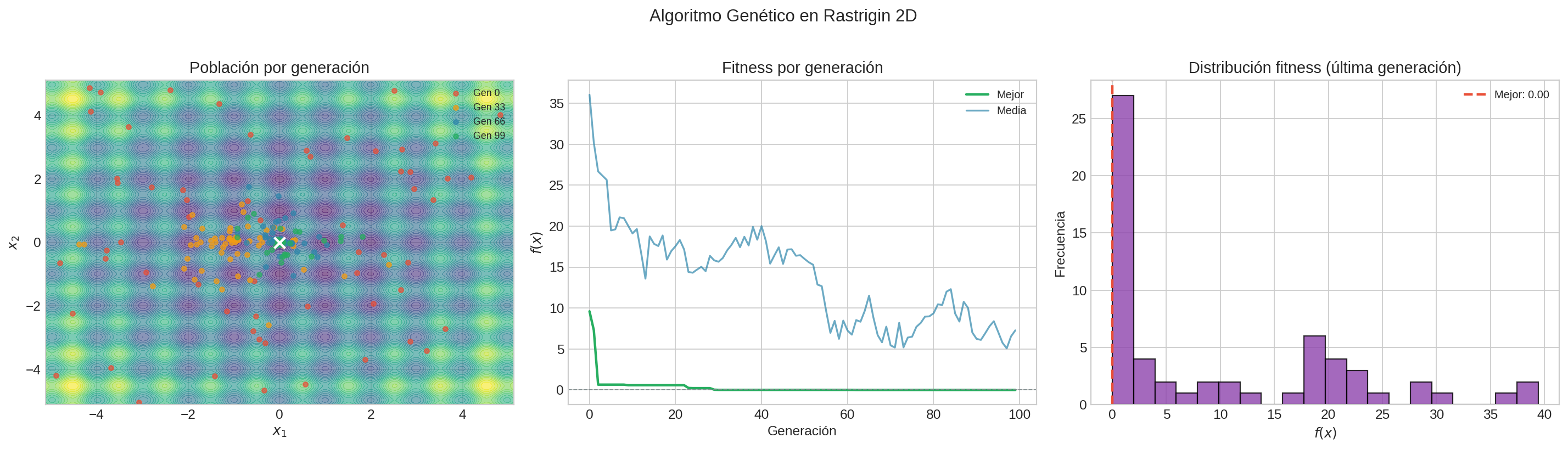
Notebook — Abre NB2, Secciones GA
- Implementa un GA desde cero en Rastrigin 2D.
- Visualiza cómo la población evoluciona y converge.
- Varía
pop_sizeymutation_rate. ¿Más población = mejor resultado?- Compara con
scipy.optimize.differential_evolution.
Comparación: todos los métodos en el mismo problema
¿Qué pasa cuando ponemos todos los métodos a competir en la misma función? La función de Rastrigin es perfecta para esto: tiene muchos mínimos locales, así que los métodos de gradiente se atascan, mientras que las metaheurísticas pueden encontrar el global.
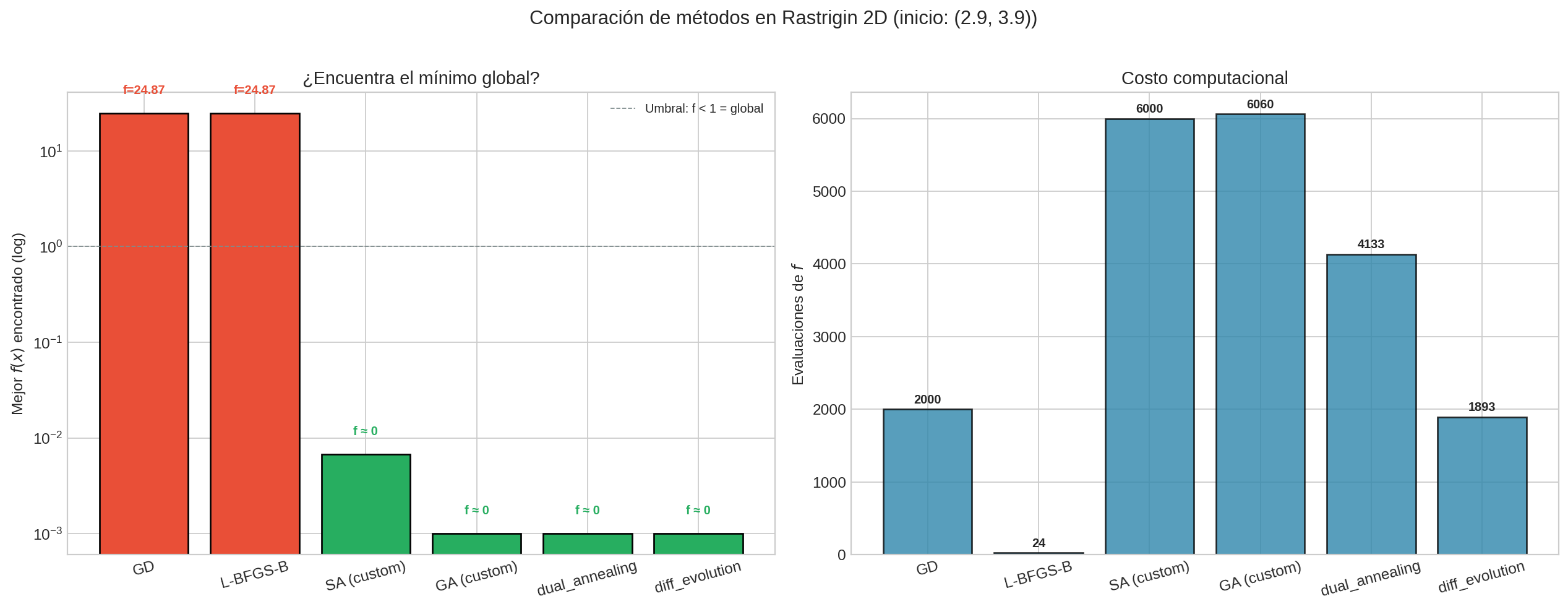
| Método | ¿Necesita gradiente? | ¿Encuentra el global? | Evaluaciones |
|---|---|---|---|
| GD | Sí | No (se atasca en local) | ~2000 |
| L-BFGS-B | Sí | No (se atasca en local) | ~50 |
| SA (custom) | No | A veces | ~6000 |
| GA (custom) | No | A veces | ~6000 |
dual_annealing |
No | Sí (casi siempre) | ~2000-5000 |
differential_evolution |
No | Sí (casi siempre) | ~3000-5000 |
Regla práctica:
- Si tienes gradiente y el problema es convexo → GD/L-BFGS-B (rápido, garantizado)
- Si tienes gradiente y no es convexo → SGD/Adam (puede escapar sillas)
- Si no tienes gradiente →
dual_annealingodifferential_evolutionde scipy - Si el problema es discreto/combinatorio → GA o SA
Notebook — Abre NB2, Sección Comparación
- Ejecuta todos los métodos en Rastrigin desde el mismo punto inicial.
- ¿Cuáles encuentran el mínimo global? ¿Cuántas evaluaciones necesitan?
- ¿Qué método elegirías en la práctica?
Taxonomía de algoritmos
Tabla rápida: ¿qué método elegir?
Usa esta tabla como cheat sheet. La clave es identificar 3 cosas del problema: (1) ¿tienes gradiente?, (2) ¿hay restricciones/enteros?, (3) ¿es convexo o no?
| Si tu problema es… | Método recomendado | ¿Qué garantiza? | En Python |
|---|---|---|---|
| Suave, sin restricciones, convexo | GD o L-BFGS-B | Óptimo global (convexo) | scipy.optimize.minimize(..., method="L-BFGS-B") o tu GD |
| Suave, sin restricciones, no convexo | SGD/Adam (si hay datos) o L-BFGS-B | Punto crítico / buen mínimo local (sin certificado global) | ML: PyTorch/TF; también minimize |
| Suave, con igualdades (h(x)=0) | Lagrange (análisis) / solver con restricciones | Óptimo global si convexo + igualdades afines; si no, solo candidato | minimize(..., constraints={"type":"eq",...}) |
| Suave, con desigualdades (g(x)\le 0) | KKT (teoría) / métodos de puntos interiores | Óptimo global si convexo + Slater; si no, no hay garantía global | minimize(..., constraints=[{"type":"ineq",...}]) |
| Todo lineal (LP) | Simplex / HiGHS | Óptimo global o certificado infeasible/unbounded | scipy.optimize.linprog(..., method="highs") |
| Lineal + variables enteras (IP/MIP) | Branch-and-bound / MIP solver | Óptimo entero (puede ser lento) | scipy.optimize.milp(...) (o OR-Tools/PuLP) |
| Caja negra (sin gradiente), dominio acotado | dual_annealing / differential_evolution |
Buena solución (sin certificado) | scipy.optimize.dual_annealing, differential_evolution |
| Combinatorio/discreto sin solver | GA / SA | Heurístico (sin certificado) | Implementación propia (o librerías evolutivas) |
graph TD
A["1) ¿Tienes gradiente?"] -->|Sí| B["2) ¿Es convexo? (aprox)"]
A -->|No| K["¿Es discreto/entero?"]
K -->|Sí| L["MIP / Branch & Bound<br/>(milp, OR-Tools)"]
K -->|No| M["¿Caja negra acotada?"]
M -->|Sí| O["dual_annealing / differential_evolution"]
M -->|No| N["Heurísticas ad-hoc<br/>(SA/GA)"]
B -->|Sí| D["3) ¿Restricciones?"]
B -->|No| E["No convexo con gradiente<br/>SGD/Adam o L-BFGS-B"]
D -->|No| F["Sin restricciones<br/>L-BFGS-B / Newton / GD"]
D -->|Lineales| I["LP exacto<br/>HiGHS (linprog)"]
D -->|Enteras| L
D -->|No lineales| H["KKT / puntos interiores<br/>(solvers)"]
Empareja cada problema con el algoritmo más apropiado:
| Problema | Algoritmo |
|---|---|
| 1. $\min c^T x$ s.t. $Ax \leq b$ | a. Descenso de gradiente |
| 2. Entrenar una red neuronal | b. Simplex |
| 3. $\min f(x)$ s.t. $h(x) = 0$, $f$ y $h$ diferenciables | c. Simulated annealing |
| 4. Optimizar una función de caja negra ruidosa | d. Multiplicadores de Lagrange |
| 5. $\max \sum v_i x_i$ s.t. $\sum w_i x_i \leq W$, $x_i \in {0,1}$ | e. MIP (milp) |
| 6. Encontrar la mejor arquitectura de red neuronal | f. Algoritmo genético |
Ver Solución
1 → b (Simplex: problema lineal) 2 → a (Descenso de gradiente / SGD / Adam: sin restricciones, con gradiente) 3 → d (Lagrange: restricción de igualdad, diferenciable) 4 → c (Simulated annealing: sin gradiente, función de caja negra) 5 → e (MIP: variables binarias con restricciones lineales — es el problema de la mochila) 6 → f (Algoritmo genético / NAS: espacio de búsqueda discreto y combinatorio)
Siguiente: Ejemplos en Python →