D2: Incertidumbre y D3: Objetivo Matemático
Dimensión 2: Interpretación de Probabilidad/Incertidumbre
La probabilidad es un número. Pero ¿qué significa ese número?
Pregunta clave: “Cuando digo ‘hay 70% de probabilidad de lluvia’, ¿qué significa ese número?”
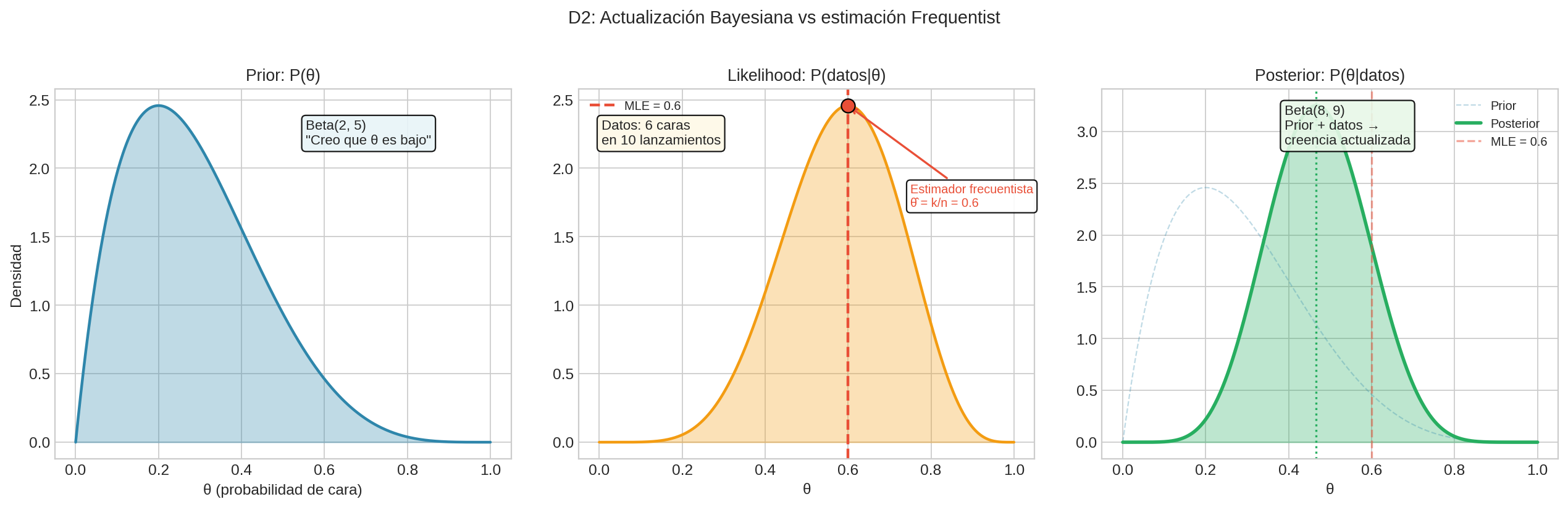
Dos estadísticos miran la misma moneda.
El frecuentista dice: “Existe una probabilidad verdadera de que caiga cara. No la conozco, pero si repito el experimento miles de veces, la frecuencia observada me la revelará.”
El bayesiano dice: “La moneda ya tiene un lado arriba — solo no lo veo. Mi ‘50%’ no describe la moneda, describe lo que yo sé. Si viera cómo la lanzas — el ángulo, la fuerza — mi probabilidad cambiaría. La incertidumbre está en mí, no en ella.”
Ninguno está equivocado. El primero habla del mundo. El segundo habla del conocimiento sobre el mundo.
| Interpretación | Filosofía | Qué es un parámetro θ | Qué es incertidumbre | Situación real |
|---|---|---|---|---|
| Frequentist | Probabilidad = frecuencia límite en repeticiones infinitas | Constante fija desconocida | Variabilidad muestral | A/B testing: “si repitiera el experimento infinitas veces, ¿qué fracción favorece A?” |
| Bayesian | Probabilidad = grado de creencia subjetivo | Variable aleatoria con distribución | Se actualiza con evidencia | Diagnóstico médico: “dado el historial del paciente, mi creencia de que tiene X es 30%” |
| Propensity | Probabilidad = tendencia inherente del sistema | Propiedad del mecanismo causal | Irreducible, parte de la realidad | Física cuántica: la probabilidad es propiedad del electrón, no de nuestra ignorancia |
flowchart TD
Q["¿Qué significa P = 0.7?"]
Q --> F["Frequentist: 70% en repeticiones infinitas"]
Q --> B["Bayesian: 70% dado lo que sé"]
Q --> P["Propensity: tendencia física del 70%"]
Nota filosófica: Tipos de incertidumbre y el debate Popper-Jaynes
La distinción entre interpretaciones tiene raíces filosóficas profundas sobre la naturaleza de la incertidumbre:
Karl Popper y la Propensity: Popper argumentó que la probabilidad puede ser una tendencia objetiva del mundo físico — una “propensión” real del sistema a producir ciertos resultados. Bajo esta vista, cuando decimos que un electrón tiene 50% de probabilidad de spin-up, esto es una propiedad física del electrón, no de nuestro conocimiento.
E.T. Jaynes y la incertidumbre epistémica: En “Probability Theory: The Logic of Science”, Jaynes argumenta algo diferente. Considera el ejemplo de una urna con bolas o una baraja de cartas:
Cuando asignamos P = 1/52 a sacar el As de Espadas de una baraja “bien barajada”, ¿es porque la baraja tiene una “propensión” objetiva?
Jaynes diría: No. La baraja tiene un orden físico determinado después de barajar. Si conociéramos exactamente:
- La posición inicial de cada carta
- La mecánica exacta de cada movimiento del barajeo
- Las propiedades físicas de las cartas
…podríamos predecir el orden final con certeza. La probabilidad 1/52 refleja nuestra ignorancia (o nuestra decisión de no modelar la física), no una propiedad de la baraja.
Dos tipos de incertidumbre:
| Tipo | Nombre | Descripción | ¿Reducible? | Ejemplo |
|---|---|---|---|---|
| Epistémica | “No sé” | Incertidumbre por falta de conocimiento | Sí, con más información | Baraja: no conozco el orden, pero existe uno |
| Aleatoria | “No se puede saber” | Incertidumbre irreducible del sistema | No, es fundamental | ¿Mecánica cuántica? (debatido) |
La posición de Jaynes: Para Jaynes, casi toda la “aleatoriedad” que usamos en estadística y ML es realmente epistémica disfrazada. Modelamos urnas, dados, y barajas como “aleatorios” porque:
- No conocemos los detalles mecánicos
- No queremos (o no podemos) modelarlos
- La aproximación probabilística funciona bien en la práctica
Esto no significa que la probabilidad sea inútil — al contrario, Jaynes la defiende como la herramienta correcta para razonar bajo incertidumbre. Pero es honesto sobre su naturaleza: describe nuestro estado de conocimiento, no necesariamente el mundo.
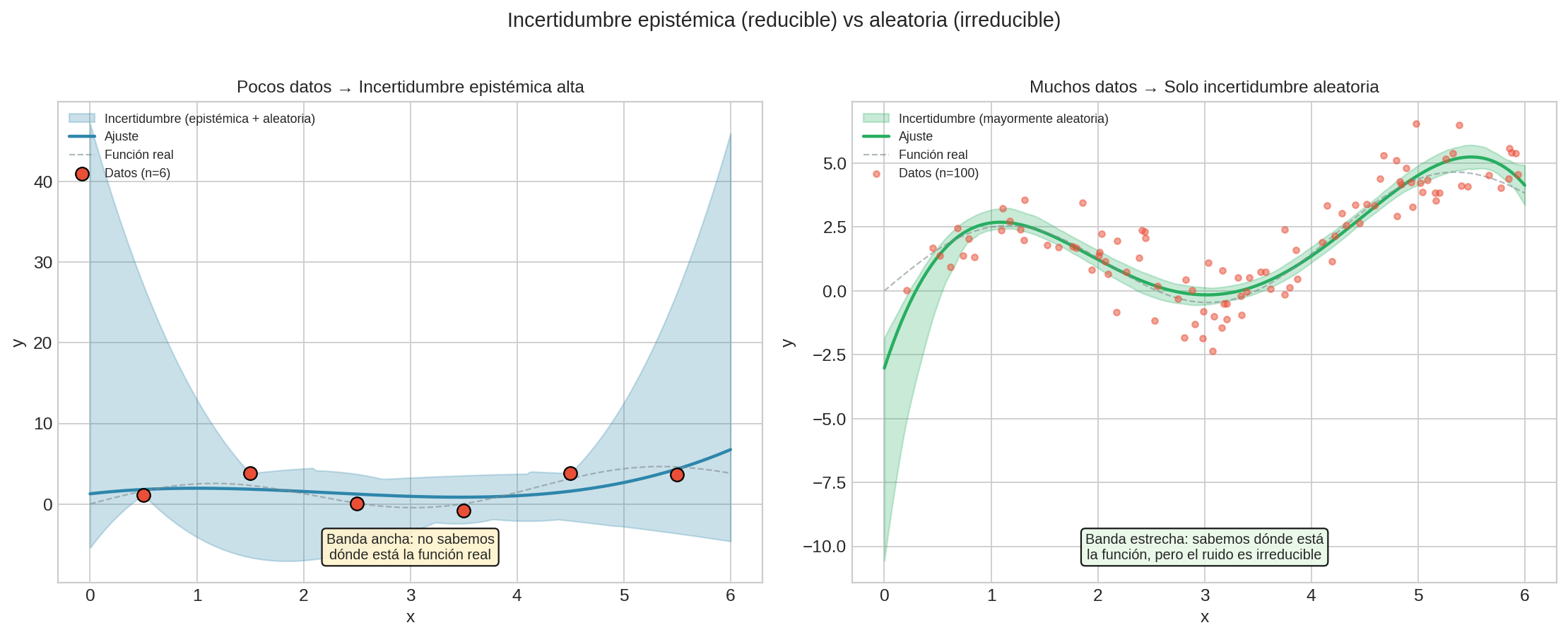
Implicación práctica: En ML, la distinción aparece como:
- Incertidumbre epistémica → Incertidumbre sobre los parámetros del modelo (reducible con más datos)
- Incertidumbre aleatoria (aleatoric) → “Ruido” en los datos (supuestamente irreducible)
Pero siguiendo a Jaynes, incluso lo que llamamos “ruido aleatorio” puede ser epistémico — variables que no medimos o no incluimos en el modelo.
Implicaciones prácticas
| Aspecto | Frequentist | Bayesian |
|---|---|---|
| Output del modelo | Punto óptimo $\hat{\theta}$ | Distribución $P(\theta \mid \text{Data})$ |
| Intervalos de confianza | “Si repitiera, 95% contendrían el verdadero valor” | “Hay 95% de probabilidad de que $\theta$ esté aquí” |
| Priors | No existen (o son implícitos) | Explícitos y requeridos |
| Computación | Típicamente más simple | Típicamente más costosa (MCMC, VI) |
Nota importante: Puedes ser Deductivo+Frequentist, Deductivo+Bayesian, Inductivo+Frequentist, Inductivo+Bayesian. Son ejes independientes.
¿Cuándo usar cada interpretación?
| Situación | Enfoque recomendado |
|---|---|
| Muchos datos, pocos parámetros | Frequentist (MLE basta) |
| Pocos datos, conocimiento previo fuerte | Bayesian (priors ayudan) |
| Necesitas cuantificar incertidumbre en parámetros | Bayesian |
| A/B testing, experimentos repetibles | Frequentist |
| Diagnóstico, actualización secuencial | Bayesian |
| Solo necesitas predicción puntual | Cualquiera (Frequentist más simple) |
Estas son heurísticas, no reglas. La elección óptima en esta dimensión depende de las otras cuatro — entender el sistema completo es más importante que optimizar cada eje por separado.
Dimensión 3: Objetivo Matemático
No todos los que predicen quieren lo mismo.
Pregunta clave: “¿Qué cantidad estás tratando de estimar?”
Una vez que decides cómo tratar la incertidumbre (D2), debes decidir qué estimar. Estas dos decisiones son naturalmente consecutivas: la interpretación probabilística define el marco, el objetivo define qué quieres dentro de ese marco.
Recordatorio de notación:
| Símbolo | Significado | Ejemplo |
|---|---|---|
| X | Features/inputs observados | Imagen, texto, mediciones |
| Y | Variable objetivo a predecir | Etiqueta, precio, categoría |
| Z | Variable auxiliar observada (información extra) | Metadata, contexto, otra modalidad |
| L | Variable latente (no observada, inferida) | Representación comprimida, estado oculto |
| C | Cluster o categoría discreta | Segmento de cliente, tópico |
La diferencia clave: Z es observable (la tienes en tus datos), L es latente (la infiere el modelo).
Caso A: CON variable objetivo Y (Supervised)
| Objetivo | Notación | Qué obtienes | Cuándo usarlo | Situación real |
|---|---|---|---|---|
| Distribución condicional | $P(Y \mid X)$ | Forma completa de la distribución | Necesitas incertidumbre completa | Pronóstico meteorológico: no solo “lloverá” sino probabilidad por intensidad |
| Valor esperado | $E[Y \mid X]$ | Solo la media | Predicción puntual suficiente | Precio de casa: quieres UN número |
| Efecto causal | $P(Y \mid do(X))$ | Resultado de intervención | Decisiones, políticas | Pricing: ¿qué pasa si CAMBIO el precio del producto? |
| Quantiles/Intervalos | $Q_\alpha(Y \mid X)$ | Percentiles específicos | Riesgo, predicción robusta | VaR en finanzas: ¿cuál es la pérdida máxima al 95%? |
Caso B: SIN variable objetivo (Unsupervised)
| Objetivo | Notación | Qué obtienes | Cuándo usarlo | Situación real |
|---|---|---|---|---|
| Distribución de datos | $P(X)$ | Densidad de probabilidad | Detección de anomalías, generación | Fraude: transacciones con baja $P(X)$ son sospechosas |
| Representación | $\phi(X) \to L$ | Embedding/compresión (L es latente) | Reducción de dimensión, transfer | Autoencoder: comprimir imágenes; BERT: embeddings de texto |
| Estructura latente discreta | $P(C \mid X)$ | Asignación a clusters | Segmentación, taxonomía | Segmentar clientes en grupos de comportamiento |
| Reconstrucción | $E[X]$ o $\hat{X}$ | Versión “limpia” de input | Denoising, imputación | Restaurar imagen borrosa, completar datos faltantes |
Caso C: MIXTO (Self-supervised, Generativo)
| Objetivo | Notación | Qué obtienes | Cuándo usarlo | Situación real |
|---|---|---|---|---|
| Distribución con latentes | $P(X,L)$ | Modelo generativo con espacio latente | Datos faltantes, generación | VAE: generar caras nuevas; L captura variaciones |
| Predicción de parte de X | $P(X_2 \mid X_1)$ | Y derivado del mismo X | Pretraining, representaciones | GPT: predecir siguiente palabra; BERT: predecir palabra enmascarada |
¿Qué objetivo elegir?
| Tu necesidad | Objetivo recomendado |
|---|---|
| Un número (predicción puntual) | $E[Y \mid X]$ |
| Probabilidad de cada clase | $P(Y \mid X)$ |
| Cuantificar riesgo (colas) | $Q_\alpha(Y \mid X)$ (quantiles) |
| Tomar decisiones / intervenir | $P(Y \mid do(X))$ (causal) |
| Detectar anomalías | $P(X)$ (densidad) |
| Comprimir / representar datos | $\phi(X)$ (embeddings) |
| Agrupar sin etiquetas | $P(C \mid X)$ (clustering) |
| Pretraining para transfer | $P(X_2 \mid X_1)$ (self-supervised) |
Estas son heurísticas, no reglas. La elección óptima en esta dimensión depende de las otras cuatro — entender el sistema completo es más importante que optimizar cada eje por separado.
Anterior: Fuente del conocimiento (D1) | Siguiente: Arquitectura y supuestos (D4 + D5) →