Espacio de estados
“Well-defined problems are the beginning of solutions.”
En el módulo 2 definimos un agente racional como aquel que toma acciones para maximizar su medida de desempeño. Ahora necesitamos ser más precisos: ¿cómo representa un agente el problema que está resolviendo? ¿Cómo sabe qué acciones tiene disponibles y qué consecuencias tienen?
La respuesta es el espacio de estados: una formulación formal del problema que lo convierte en un grafo que podemos explorar.
1. Conexión con el módulo de agentes
Recordemos la clasificación de Russell & Norvig que vimos en el módulo 2. Un agente basado en objetivos (goal-based agent) necesita saber cuál es su meta y buscar secuencias de acciones para alcanzarla.
Los entornos más simples para estudiar búsqueda son:
| Propiedad | Valor |
|---|---|
| Observable | Totalmente (el agente conoce el estado completo) |
| Determinista | Sí (las acciones tienen efecto predecible) |
| Estático | Sí (el entorno no cambia mientras el agente piensa) |
| Discreto | Sí (número finito de estados y acciones) |
| Un agente | Sí |
En este entorno, el problema del agente se reduce completamente a encontrar un camino en un grafo. Eso es búsqueda.
2. Formulación del problema
Un problema de búsqueda se especifica con cinco componentes:
$$\text{Problema} = (S,; s_0,; A,; T,; \text{Goal})$$
| Símbolo | Nombre | Significado |
|---|---|---|
| $S$ | Estados | Conjunto de todas las configuraciones posibles del mundo |
| $s_0 \in S$ | Estado inicial | Dónde empieza el agente |
| $A(s)$ | Acciones | Conjunto de acciones disponibles en el estado $s$ |
| $T(s, a)$ | Función de transición | Estado resultante de aplicar $a$ en $s$ |
| $\text{Goal}(s)$ | Test de objetivo | Predicado: ¿es $s$ una solución? |
Una solución es una secuencia de acciones $a_1, a_2, \ldots, a_k$ tal que:
$$T(T(\ldots T(s_0, a_1)\ldots, a_{k-1}), a_k) = s^{∗}$$
donde $\text{Goal}(s^{∗}) = \text{True}$.
3. El espacio de estados como grafo
Una vez tenemos la formulación $(S, s_0, A, T, \text{Goal})$, el espacio de estados es el grafo dirigido donde:
- Nodos = estados en $S$
- Aristas = pares $(s, T(s,a))$ para todo $s \in S$ y $a \in A(s)$
Buscar una solución equivale a encontrar un camino desde $s_0$ hasta cualquier estado $s^{∗}$ con $\text{Goal}(s^{∗}) = \text{True}$.
Este es el puente entre la formulación abstracta del problema y los algoritmos de grafos que vamos a desarrollar.
4. Ejemplo 1: robot en una cuadrícula
Problema: un robot en una cuadrícula de $3 \times 3$ con un obstáculo quiere ir de la esquina superior-izquierda a la esquina inferior-derecha.
| Componente | Definición |
|---|---|
| $S$ | ${(r,c) \mid 0 \leq r,c \leq 2,; (r,c) \neq (1,1)}$ — celdas libres |
| $s_0$ | $(0, 0)$ |
| $A(s)$ | ${\text{arriba, abajo, izquierda, derecha}}$ restringidas a celdas libres |
| $T((r,c), \text{abajo})$ | $(r+1, c)$ si es celda libre |
| $\text{Goal}(s)$ | $s = (2, 2)$ |
El espacio de estados tiene 8 nodos (9 celdas menos el obstáculo) y un número de aristas proporcional al número de movimientos válidos.
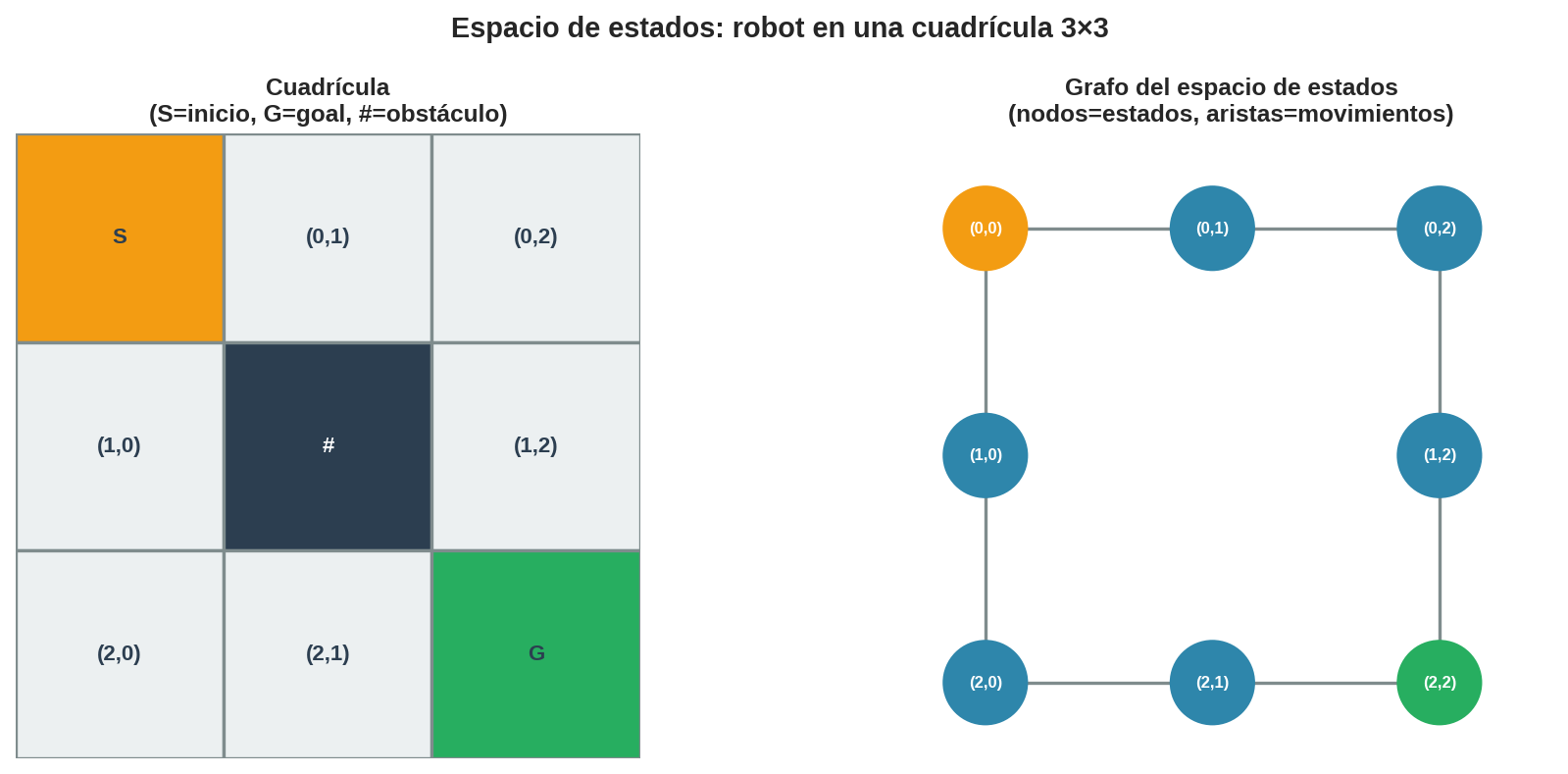
La imagen muestra: a la izquierda, la cuadrícula física con el obstáculo; a la derecha, el grafo del espacio de estados donde cada celda libre es un nodo y cada movimiento válido es una arista.
5. Ejemplo 2: problema del mapa de rutas
Problema: encontrar un camino de carretera entre dos ciudades.
| Componente | Definición |
|---|---|
| $S$ | Conjunto de ciudades |
| $s_0$ | Ciudad de origen (ej. Ciudad de México) |
| $A(s)$ | Ciudades conectadas directamente por carretera |
| $T(s, a)$ | La ciudad $a$ (la acción es el destino) |
| $\text{Goal}(s)$ | $s = $ ciudad de destino (ej. Guadalajara) |
Aquí el espacio de estados es el mapa de carreteras — el grafo ya existe explícitamente.
6. Tamaño del espacio de estados: por qué importa
El tamaño del espacio de estados determina si un problema es tratable o no. Empecemos con un caso que ya conocemos.
Nuestro robot en cuadrícula $3 \times 3$: 8 estados alcanzables. BFS lo resuelve en microsegundos. Fácil.
¿Qué pasa cuando el problema escala? Considera algo que todos hemos visto: el Cubo de Rubik.
El cubo tiene 20 piezas móviles (8 esquinas + 12 aristas), cada una con orientaciones posibles. El número total de configuraciones distintas es exactamente:
$$\frac{8! \times 3^8 \times 12! \times 2^{12}}{12} = 43{,}252{,}003{,}274{,}489{,}856{,}000 \approx 4.3 \times 10^{19}$$
| Aspecto | Valor |
|---|---|
| Configuraciones posibles | $\approx 4.3 \times 10^{19}$ |
| Movimientos posibles por turno | $18$ (6 caras × 3 tipos de giro) |
| Profundidad máxima de solución (“God’s number”) | $20$ movimientos |
| Factor de ramificación efectivo | $\approx 13$ |
¿Puede BFS resolver el Cubo de Rubik? Veamos qué implicaría explorar todo su espacio de estados a $10^7$ expansiones por segundo:
$$\frac{4.3 \times 10^{19} \text{ estados}}{10^7 \text{ expansiones/seg}} = 4.3 \times 10^{12} \text{ segundos} \approx \mathbf{136{,}000 \text{ años}}$$
Y eso es solo el tiempo. El problema de memoria es aún más extremo: guardar cada estado requiere al menos 20 bytes. El total sería $\approx 8.6 \times 10^{20}$ bytes — más que toda la información digital que existe en el mundo hoy.
Un objeto que cabe en la palma de tu mano tiene un espacio de estados que ninguna computadora puede explorar exhaustivamente. Este es el punto central: la búsqueda ciega (BFS, DFS) solo funciona cuando el espacio de estados es pequeño. En cuanto el problema crece un poco, necesitamos guiar la búsqueda — de eso tratan los módulos de búsqueda informada más adelante.
7. Por qué necesitamos frontera y conjunto explorado
Tenemos el espacio de estados. Queremos encontrar un camino de $s_0$ a algún $s^{∗}$. La idea más naive: explorar nodo por nodo.
Pero hay dos problemas:
Problema 1: Ciclos. Un grafo con un ciclo $A \to B \to C \to A$ haría que un algoritmo ingenuo explore $A, B, C, A, B, C, \ldots$ infinitamente.
Solución: Mantener un conjunto explorado (explored set) con los nodos ya procesados completamente. Nunca volver a explorar un nodo que ya está ahí.
Problema 2: Eficiencia. No queremos re-visitar nodos que ya están pendientes de explorar.
Solución: Mantener una frontera (frontier) con los nodos descubiertos pero aún no procesados. Solo añadir a la frontera nodos que no estén ya explorados ni en la frontera.
Juntos, frontera y conjunto explorado forman la estructura del algoritmo genérico de búsqueda que veremos en el siguiente capítulo.
Siguiente: Algoritmo genérico de búsqueda →