| Notebook | Colab |
|---|---|
| Notebook 02 — Búsqueda informada (Greedy, Dijkstra, A*) | |
| Notebook 04 — Puzzle de 8 piezas (aplicación) |
Diseño de heurísticas: la ingeniería detrás de A*
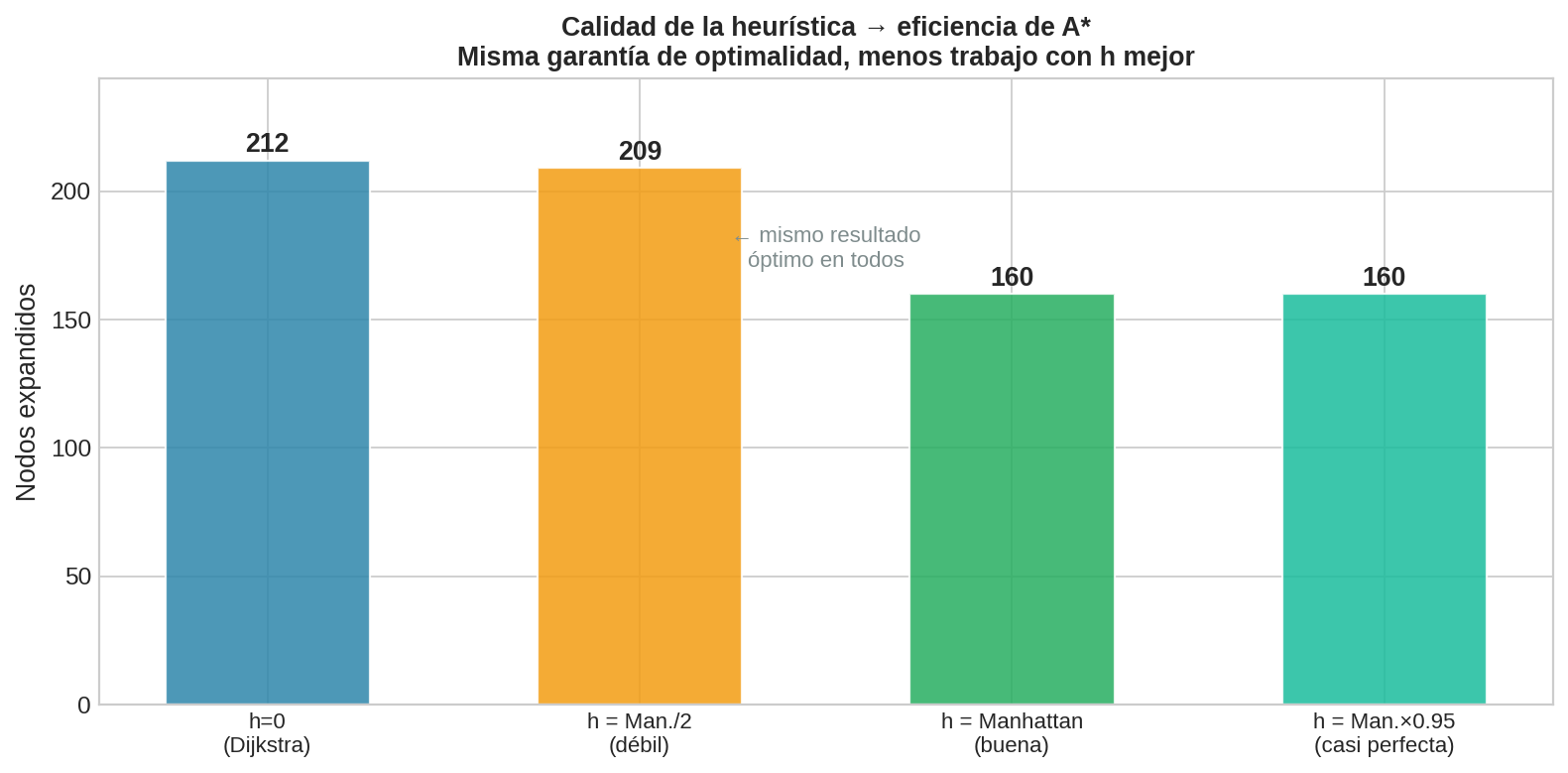
"The quality of the heuristic determines the efficiency of A*."
Sabemos que A* es óptimo con heurísticas admisibles. Pero ¿cómo se diseña una heurística admisible? Y una vez que tienes varias opciones, ¿cuál elegir? Este capítulo responde ambas preguntas con técnicas sistemáticas.
1. La técnica del problema relajado
La forma más rigurosa de construir heurísticas admisibles es el método del problema relajado: eliminar restricciones del problema original hasta obtener un problema más fácil cuya solución óptima es calculable de forma exacta o aproximada.
El resultado es automáticamente admisible porque:
$$h_{\text{relajado}}(n) = h^{∗}_{\text{relajado}}(n) \leq h^{∗}(n)$$
Al relajar restricciones, el costo óptimo en el problema relajado nunca puede ser mayor que en el original — hay más caminos disponibles en el relajado.
El puzzle de 8 piezas es un tablero de 3×3 con fichas numeradas 1-8 y un espacio vacío. Un movimiento: mover una ficha adyacente al espacio vacío.
Reglas del problema original:
- Solo puedes mover fichas adyacentes al espacio vacío.
- Solo puedes mover al espacio vacío (no a fichas ocupadas).
- Solo puedes mover una ficha a la vez.
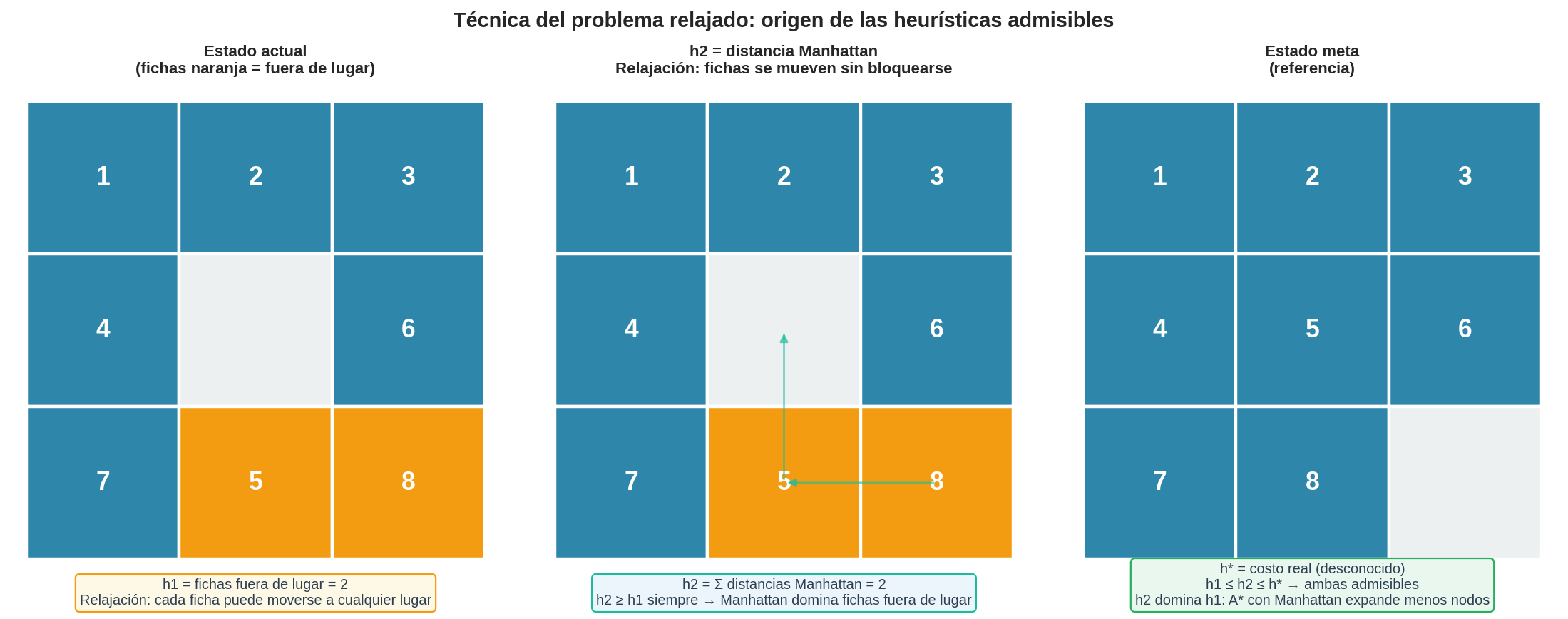
Relajación 1: eliminar restricción (1) — las fichas pueden moverse a cualquier posición adyacente, no solo al espacio.
→ En el problema relajado, el costo mínimo para llevar cada ficha a su lugar es exactamente 1 si ya está adyacente a su destino, o más si no. La suma de movimientos mínimos de cada ficha es la distancia Manhattan (suma de distancias en fila y columna). Resultado: $h_{\text{Manhattan}}(n) = \sum_i |r_i - r_i^{∗}| + |c_i - c_i^{∗}|$
Relajación 2: eliminar restricciones (1) y (2) — cada ficha puede teletransportarse a su posición final en un paso.
→ Solo cuenta cuántas fichas no están en su lugar. Resultado: $h_{\text{misplaced}}(n) = #\text{ fichas fuera de posición}$
La relajación 1 es estrictamente mejor que la 2 (lo veremos en sección 3), pero ambas son admisibles y se derivan sistemáticamente del mismo principio.
2. Las dos heurísticas del puzzle de 8 piezas
Heurística 1: fichas fuera de lugar
$$h_1(n) = \text{número de fichas que no están en su posición final}$$
Estado actual: Estado meta:
7 2 4 1 2 3
5 _ 6 4 5 6
8 3 1 7 8 _
Fichas fuera de lugar: 7, 4, 5, 6, 8, 3, 1 → h1 = 7
(la ficha 2 ya está en su lugar)
- Admisible: cada ficha descolocada necesita al menos un movimiento.
- Consistente: mover una ficha cambia el recuento en ±1 ≤ costo del movimiento (que es 1).
Heurística 2: distancia Manhattan
$$h_2(n) = \sum_{i=1}^{8} \left( |r_i - r_i^{∗}| + |c_i - c_i^{∗}| \right)$$
Estado actual: Estado meta:
7 2 4 1 2 3
5 _ 6 4 5 6
8 3 1 7 8 _
Manhattan por ficha:
Ficha 7: (0,0)→(2,0): |0-2|+|0-0| = 2
Ficha 2: (0,1)→(0,1): 0 (en su lugar)
Ficha 4: (0,2)→(1,0): |0-1|+|2-0| = 3
Ficha 5: (1,0)→(1,1): 1
Ficha 6: (1,2)→(1,2): 0
Ficha 8: (2,0)→(2,1): 1
Ficha 3: (2,1)→(0,2): 2+1 = 3
Ficha 1: (2,2)→(0,0): 2+2 = 4
h2 = 2+0+3+1+0+1+3+4 = 14
- Admisible: en el problema original, cada movimiento avanza una ficha como máximo 1 casilla en Manhattan; llegar a su destino requiere al menos la distancia Manhattan de pasos.
- Consistente: cada movimiento cambia la suma Manhattan en ±1 ≤ costo del movimiento.
Comparación: $h_2 = 14 > h_1 = 7$ para el mismo estado. $h_2$ domina a $h_1$.
3. Dominancia: elegir la heurística más informativa
Una heurística $h_a$ domina a $h_b$ si $h_a(n) \geq h_b(n)$ para todo $n$, con al menos alguna desigualdad estricta, y ambas son admisibles.
Si $h_a$ domina a $h_b$, siempre es mejor usar $h_a$.
Demostración: si $h_a(n) \geq h_b(n)$ para todo $n$, entonces cualquier nodo que A* expande con $h_a$ también lo expande con $h_b$, pero no al revés. A* con $h_a$ nunca explora más nodos, y típicamente explora muchos menos.
En el puzzle de 8 piezas:
| Heurística | Promedio de nodos expandidos (profundidad 20) |
|---|---|
| $h_1$ (fichas fuera de lugar) | ~73.000 |
| $h_2$ (Manhattan) | ~1.200 |
| $h_3$ (lineal conflict, ver abajo) | ~500 |
La diferencia es de 2 órdenes de magnitud — con la misma garantía de optimalidad.
4. El truco del máximo
Si tienes múltiples heurísticas admisibles $h_1, h_2, \ldots, h_k$ y ninguna domina completamente a las demás, puedes combinarlas:
$$h(n) = \max(h_1(n), h_2(n), \ldots, h_k(n))$$
Esta heurística combinada es:
- Admisible: el máximo de subestimaciones es también una subestimación.
- No peor que ninguna individual: domina a cada $h_i$ por definición del máximo.
- Fácil de implementar: solo calcula todas y toma el mayor.
Para el estado del ejemplo anterior: $$h(n) = \max(h_1=7, h_2=14) = 14$$
La heurística combinada es automáticamente tan buena como la mejor heurística individual, en cualquier estado.
El costo adicional es calcular todas las heurísticas en cada estado — que a menudo vale la pena si las heurísticas son rápidas de calcular pero informativas.
5. Más allá de Manhattan: conflicto lineal
La heurística de conflicto lineal mejora Manhattan considerando fichas que están en la fila o columna correcta pero en orden incorrecto.
Estado: 1 3 2 ← fila meta
Meta: 1 2 3
Las fichas 3 y 2 están en la fila correcta pero en orden invertido.
Para ordenarlas, una debe salir de la fila, hacer movimientos verticales, y regresar.
Costo adicional mínimo: 2 movimientos.
h_LC(n) = h_Manhattan(n) + 2 × (número de conflictos lineales)
Esta heurística sigue siendo admisible (los 2 movimientos adicionales son un mínimo real) y reduce significativamente los nodos expandidos.
6. Bases de datos de patrones
Para problemas más grandes (como el puzzle de 15 piezas), incluso Manhattan es insuficiente. La técnica de bases de datos de patrones (pattern databases) precomputa el costo óptimo para resolver subproblemas.
Idea: resolver el subproblema de solo las fichas 1-4 desde cualquier configuración. Almacenar estos costos en una tabla. Al buscar, consultar la tabla — el costo del subproblema es una heurística admisible para el problema completo (resolver el subconjunto no puede ser más caro que resolverlo todo).
| Técnica | Espacio precomputado | Calidad de $h$ |
|---|---|---|
| Manhattan | 0 (fórmula directa) | Buena |
| Conflicto lineal | 0 (fórmula directa) | Mejor |
| Pattern DB (fichas 1-7) | ~$10^6$ entradas | Excelente |
| Pattern DB (fichas 1-15) | ~$10^{10}$ entradas | Perfecta para el subprob. |
El tradeoff: más memoria precomputada → mejor heurística → menos expansiones en tiempo de búsqueda.
7. El tradeoff cómputo-expansión
Cada evaluación de $h$ tiene un costo computacional. No sirve de nada tener una heurística perfecta si calcularla tarda más que expandir todos los nodos.
El criterio de decisión:
$$\text{usar } h \text{ si: } \underbrace{\text{ahorro en expansiones} \times \text{costo por expansión}}{\text{ahorro total}} > \underbrace{\text{costo extra por evaluar } h}{\text{costo extra}}$$
Regla práctica:
- Heurísticas de fórmula cerrada (Manhattan, Euclidiana): coste $O(1)$ → casi siempre vale la pena.
- Heurísticas iterativas (resolver un subproblema en línea): puede que no valga la pena.
- Pattern databases: el costo de consulta es $O(1)$ (lookup en tabla) → muy eficiente una vez precomputadas.
8. Cómo diseñar tu propia heurística
Para cualquier problema nuevo, sigue estos pasos:
- Identifica las restricciones que hacen difícil el problema (adyacencia, capacidad, orden…).
- Elimina algunas para obtener un problema más fácil pero relacionado.
- Calcula el costo óptimo en el problema relajado — esa es tu heurística.
- Verifica admisibilidad: ¿el costo del problema relajado es siempre ≤ costo del original?
- Compara con otras heurísticas: usa el truco del máximo o elige la dominante.
- Mide el factor de ramificación efectivo $b^{∗}$ en instancias representativas.
Problema: visitar $n$ ciudades con costo mínimo.
Restricción original: cada ciudad exactamente una vez, formar un ciclo.
Relajación: eliminar la restricción de que sea un ciclo → solo exigir que sea un árbol que conecte todas las ciudades.
Resultado: el árbol de expansión mínimo (MST) de las ciudades no visitadas es una heurística admisible — un tour siempre tiene costo ≥ MST de las ciudades (porque el tour es un grafo más restringido que un árbol).
Esta heurística hace que A* sea competitivo en instancias medianas de TSP.
9. Resumen: propiedades y técnicas
| Propiedad / Técnica | Descripción | Garantía |
|---|---|---|
| Admisibilidad $h \leq h^{∗}$ | Nunca sobreestima | A* es óptimo |
| Consistencia $h(n) \leq c + h(n’)$ | Desigualdad triangular | No reapertura de nodos |
| Problema relajado | Eliminar restricciones | Heurística admisible automática |
| Dominancia $h_a \geq h_b$ | Siempre preferir $h_a$ | Nunca más expansiones |
| Truco del máximo $\max(h_1, h_2, \ldots)$ | Combinar heurísticas | Domina a todas las individuales |
| Pattern databases | Subproblemas precomputados | Heurísticas muy informativas |
Mensaje central: la búsqueda informada es tan buena como la heurística que se usa. Invertir tiempo en diseñar una buena heurística puede reducir el tiempo de búsqueda en órdenes de magnitud — con la misma garantía de optimalidad.
Siguiente: Branch & Bound e IDA* →