El nombre es el algoritmo
SARSA se llama así porque su actualización usa exactamente cinco elementos en orden:
$$(S,\ A,\ R,\ S’,\ A’)$$
| Letra | Representa |
|---|---|
| $S$ | estado actual |
| $A$ | acción tomada |
| $R$ | recompensa recibida |
| $S’$ | siguiente estado |
| $A’$ | siguiente acción (elegida antes de actualizar) |
La diferencia clave respecto a Q-learning: la siguiente acción $A’$ se elige antes de hacer la actualización, usando la misma política $\varepsilon$-greedy que generó $A$. El agente aprende el valor de la política que realmente ejecuta.
Regla de actualización
$$\boxed{Q(s,a) \leftarrow Q(s,a) + \alpha\bigl[r + \gamma Q(s’, a’) - Q(s,a)\bigr]}$$
donde $a’ \sim \pi_\varepsilon(s’)$ — la siguiente acción está muestreada de la política $\varepsilon$-greedy.
Comparado con el esqueleto TD de la sección anterior, el ? se llena con $Q(s’, a’)$.
Pseudocódigo
Antes de ver el código, la idea en palabras: Al inicio de cada episodio, el agente observa el estado $s$ y ya elige la primera acción $a$ con $\varepsilon$-greedy — esto es clave en SARSA. Luego entra al bucle: ejecuta $a$, recibe la recompensa $r$ y llega a $s’$. Ahora, antes de actualizar $Q$, elige la siguiente acción $a’$ usando la misma política $\varepsilon$-greedy. Con los cinco elementos $(s, a, r, s’, a’)$ en mano, aplica la regla de actualización y avanza: $s$ pasa a ser $s’$ y $a$ pasa a ser $a’$. El ciclo se repite hasta llegar al estado terminal.
SARSA(α, γ, ε, num_episodios):
Inicializa Q[s, a] ← 0 para todo (s, a)
Para cada episodio:
s ← estado_inicial()
a ← ε-greedy(Q, s) ← elegimos a ANTES de entrar al bucle
Mientras s no sea terminal:
s', r ← ejecutar(a) ← observamos (s', r)
a' ← ε-greedy(Q, s') ← elegimos a' AHORA (on-policy)
Q[s, a] ← Q[s, a] + α · (r + γ · Q[s', a'] − Q[s, a])
s ← s' ← avanzamos el estado
a ← a' ← avanzamos la acción (5-tuple completo)
La firma estructural de SARSA: a' se selecciona dentro del bucle, antes de actualizar, y luego se usa como la acción del siguiente paso.
Esto es lo que lo hace on-policy.
Traza completa: 2 episodios sobre la escalera
Parámetros: $\alpha = 0.5$, $\gamma = 1$, $\varepsilon = 0.4$. La tabla $Q$ empieza en cero.
Episodio 1: trayectoria $0 \to 1 \to 3 \to 5$
El agente elige las acciones con $\varepsilon$-greedy (con la tabla en cero, las acciones greedy son todas iguales, así que explorar o explotar es equivalente). Fijamos esta trayectoria para el ejemplo:
| Paso | $s$ | $a$ | $r$ | $s’$ | $a’$ (on-policy) | $\delta$ | Actualización |
|---|---|---|---|---|---|---|---|
| 1 | 0 | $+1$ | $-2$ | 1 | $+2$ | $-2 + 0 - 0 = -2$ | $Q(0,+1) \mathrel{+}= 0.5 \cdot (-2) = -1.0$ |
| 2 | 1 | $+2$ | $-10$ | 3 | $+2$ | $-10 + 0 - 0 = -10$ | $Q(1,+2) \mathrel{+}= 0.5 \cdot (-10) = -5.0$ |
| 3 | 3 | $+2$ | $0$ | 5 (meta) | — | $0 + 0 - 0 = 0$ | $Q(3,+2)$ no cambia |
Recompensas: $R(s’=1)=-2$ (costo de estado 1), $R(s’=3)=-10$ (costo de estado 3), $R(s’=5)=0$ (meta).
Tabla $Q$ después del episodio 1:
| Estado | $+1$ | $+2$ |
|---|---|---|
| $s=0$ | −1.0 | 0 |
| $s=1$ | 0 | −5.0 |
| $s=2$ | 0 | 0 |
| $s=3$ | 0 | 0 |
| $s=4$ | 0 | — |
Episodio 2: trayectoria $0 \to 2 \to 4 \to 5$
Ahora hay valores en la tabla. En $s=0$: $Q(0,+1)=-1.0$ y $Q(0,+2)=0$. La acción greedy es $+2$. $\varepsilon$-greedy puede explorar: fijamos que elige $+2$ (greedy).
| Paso | $s$ | $a$ | $r$ | $s’$ | $a’$ (on-policy) | $\delta$ | Actualización |
|---|---|---|---|---|---|---|---|
| 1 | 0 | $+2$ | $-5$ | 2 | $+2$ (exploración) | $-5 + 1 \cdot 0 - 0 = -5$ | $Q(0,+2) \mathrel{+}= 0.5 \cdot (-5) = -2.5$ |
| 2 | 2 | $+2$ | $-1$ | 4 | $+1$ (única acción) | $-1 + 1 \cdot 0 - 0 = -1$ | $Q(2,+2) \mathrel{+}= 0.5 \cdot (-1) = -0.5$ |
| 3 | 4 | $+1$ | $0$ | 5 (meta) | — | $0 + 0 - 0 = 0$ | $Q(4,+1)$ no cambia |
Recompensas: $R(s’=2)=-5$ (costo de estado 2), $R(s’=4)=-1$ (costo de estado 4), $R(s’=5)=0$ (meta).
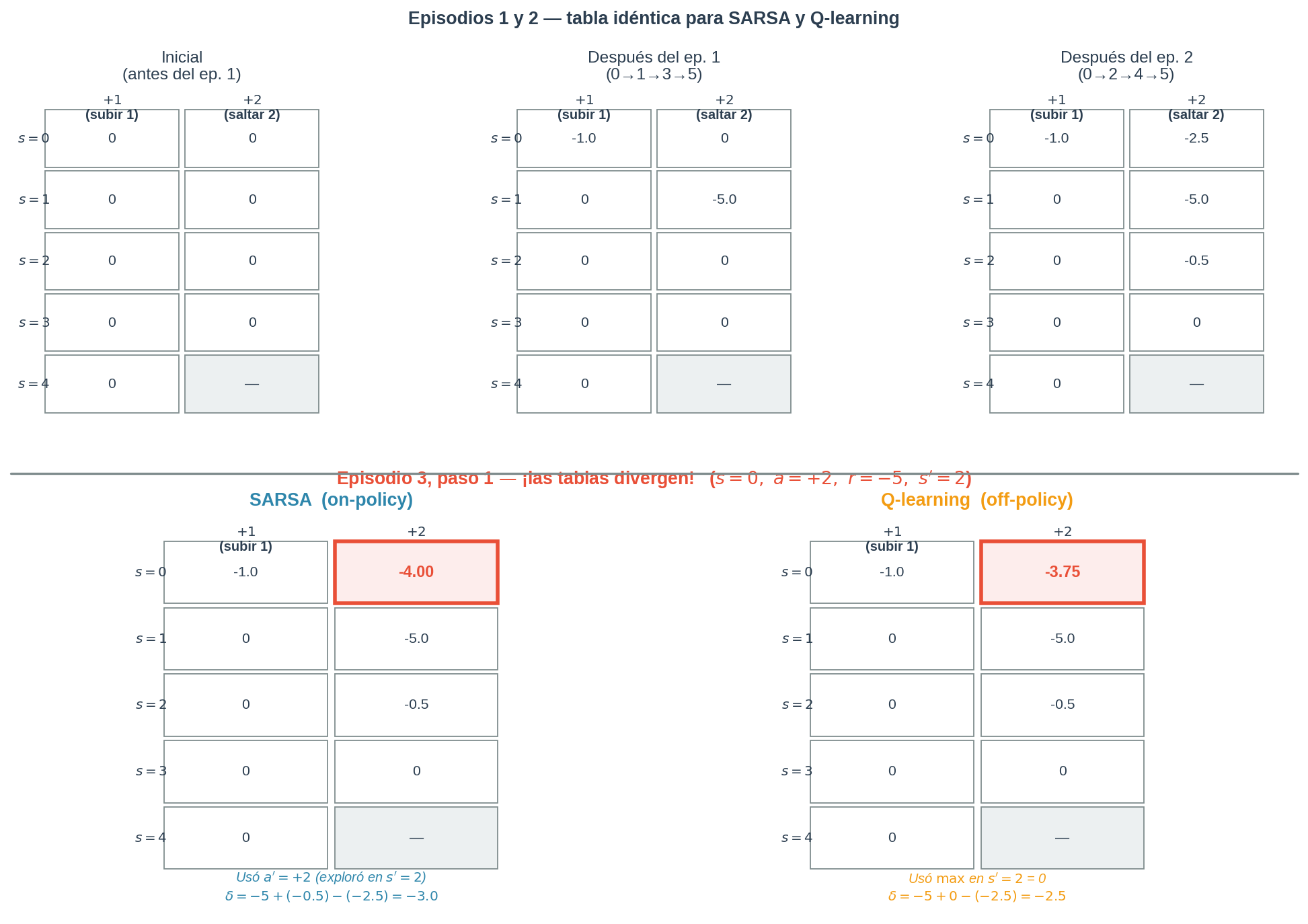
Tabla $Q$ después del episodio 2 — idéntica en SARSA y Q-learning hasta aquí:
| Estado | $+1$ | $+2$ |
|---|---|---|
| $s=0$ | −1.0 | −2.5 |
| $s=1$ | 0 | −5.0 |
| $s=2$ | 0 | −0.5 |
| $s=3$ | 0 | 0 |
| $s=4$ | 0 | — |
Esta es la tabla en la que vimos el momento de divergencia en la sección anterior.
Convergencia de SARSA
Con $\varepsilon$ fijo: SARSA converge a $Q^{\pi_\varepsilon}$ — el valor de la política $\varepsilon$-greedy, no la política greedy pura. $Q^{\pi_\varepsilon}(s,a)$ es ligeramente peor que $Q^∗(s,a)$ porque el agente sigue explorando ocasionalmente con probabilidad $\varepsilon$.
Con $\varepsilon \to 0$ (decrementando gradualmente): SARSA converge a $Q^∗$ (bajo condiciones de convergencia estándar: visitas infinitas y tasa de aprendizaje decreciente).
¿Por qué SARSA con $\varepsilon$ fijo no converge a $Q^∗$? Porque la política $\pi_\varepsilon$ nunca es completamente greedy: siempre hay una probabilidad $\varepsilon$ de tomar una acción subóptima. SARSA aprende fielmente el valor de esa política — incluyendo sus imperfecciones.
Esto no es un defecto; es una característica: SARSA es honesto sobre lo que el agente hará en el futuro. En entornos peligrosos (como el problema del acantilado), esa honestidad puede ser preferible.